こんにちは、アールティ営業部の渋谷です。
アールティ製品を実際にご活用いただいている方への特別インタビュー企画の後編です。
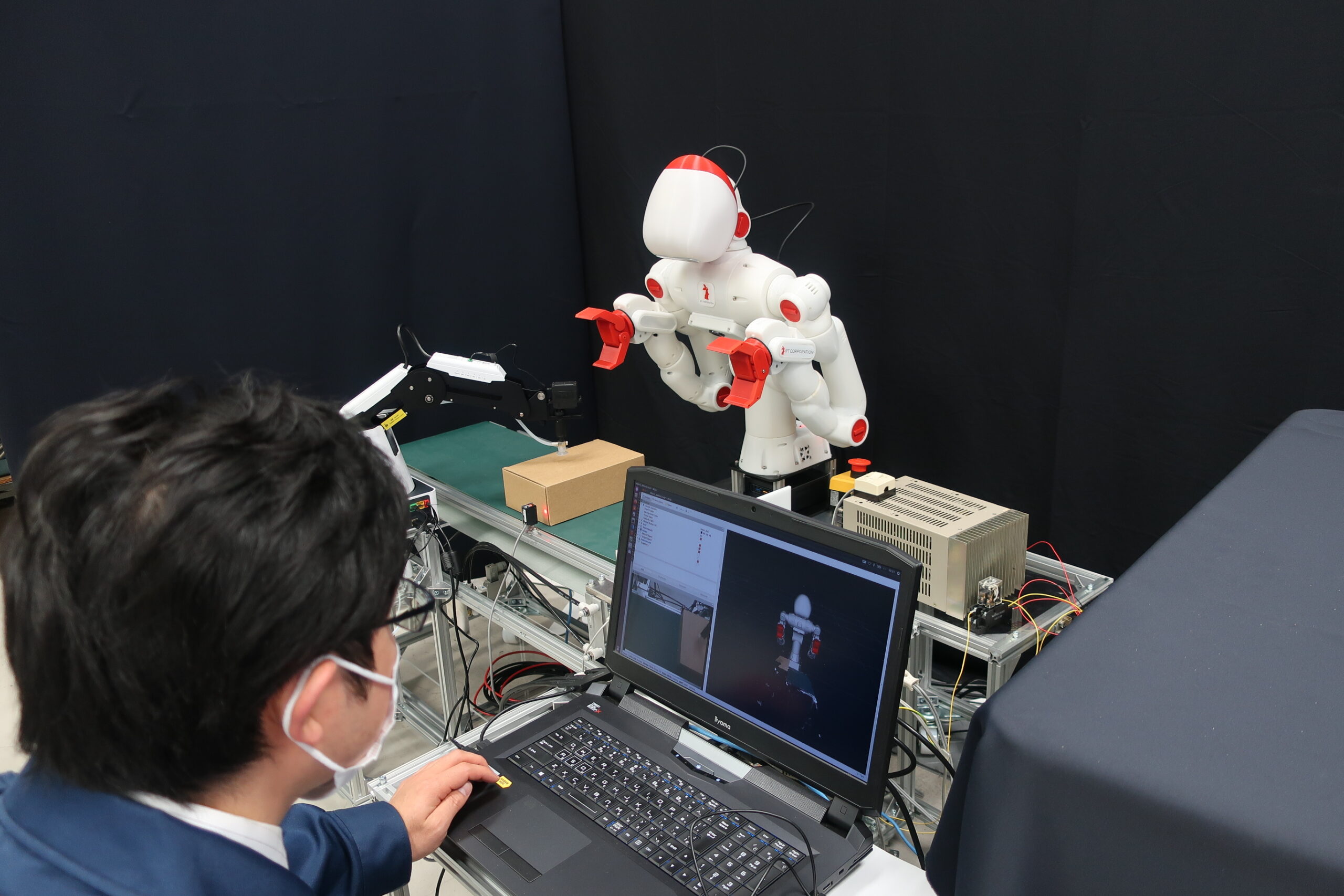
アールティの研究開発向け上半身人型ロボットSciurus17の活用事例をご紹介します。
Sciurus17購入のきっかけや決め手
赤井様:ロボットのプロジェクトが立ち上がった時、何をするか話し合いました。自動化は「ラインをごっそり入れ替える」という議論になりがちですが、中小企業の方に使っていただくのであれば、やはりそれは難しいだろうと思います。
そこで作業員からロボットに入れ替えることを想定して双腕ロボットが必要であると最初の段階から話していまして、情報収集のためにいくつかの学会に行っていたんです。
その時アールティさんが出していた機器展示ブースでSciurus17が動いているのを見て「これはいいんじゃないか」と思い、購入させていただきました。
赤井様:懸念がなかったというと嘘になりますが、当時アールティさんはアーム型ロボットのCRANE-X7を販売されている実績がありましたし、RealSenseなどよく使われて実績あるパーツが採用されているので、大丈夫だろうという見込みがありました。
またROSが手軽に使える双腕ロボットが、当時はあまりなかったように記憶しています。研究となると、ハンドを改造したり、どこにセンサを付けるかなどを想定します。他社さんのロボットだと改造が難しそうだったので、Sciurus17しかないと思って購入しました。
赤井様:そうですね、ROSが使える双腕ロボットで、我々の予算に合うものというのが決め手でした。
Sciurus17の使用感
購入前・購入後でイメージは変わった?
赤井様:Sciurus17はGitHub上でソースコードとサンプルプログラムを全て公開して頂いているので、購入前に全てダウンロードしてGazebo上で動かし、どんな動きをするのか、どんなことが出来るのかを試すことができました。
同等の動きを入れたらすぐに実機も動かせたので、そのお陰ですぐ実機での研究に移ることができました。
実際に動かしてみると、やはりGazebo上の動きと実機の動きの誤差は多少ありましたね。
またちょっとしたアームの振動が少し気になりました。
宮島様:以前の職場では産業用ロボットを使っていたので、当初は「柵がなくて本当に大丈夫?」と思っていました。
協働ロボットに触るのはSciurus17が初めてだったのですが、「近づいてぶつかってもケガをしない!」という感じで横にいて使いやすいという感覚が非常に強いです。
またソースコードを全て公開してくれている点が非常に大きいです。例えば腕の速度制御をやろうとしたときに、ROSコントロール周りのソースコードが全てあるので、そこを見ながら「ここを書いたら出来るんじゃないか」と検証ができました。
実際には、速度制御が上手く扱いきれなくて実装はしていませんが、その辺りを試せるのが研究開発用のロボットとして非常にありがたいです。
ソフトウェアの開発
宮島様:MoveItをDescartes(※1)で書き換えたり、あとはバラバラに落ちているペットボトルをSciurus17が拾って容器の中に入れるピックアンドプレースをしました。
ピックアンドプレースのサンプルがないかアールティさんに聞いたところ公開していただいたので、非常にありがたかったです。
頂いたサンプルは角度が決め決めだったのですが、角度がバラバラの場合でも拾えるように自分でPCL(※2)のライブラリを使って置き換え、無造作に置かれたペットボトルを拾えるようにしました。
頂いたサンプルを自分で公開されているライブラリに置き換えることが出来るという点で、ROSのメリットを非常に強く感じました。
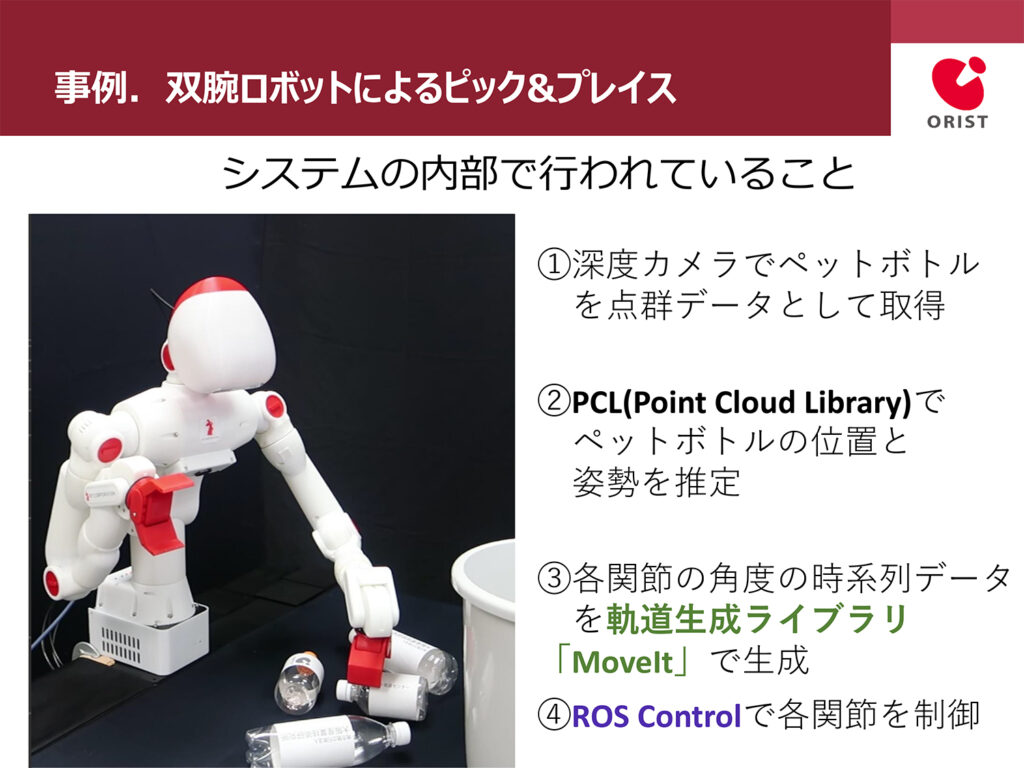
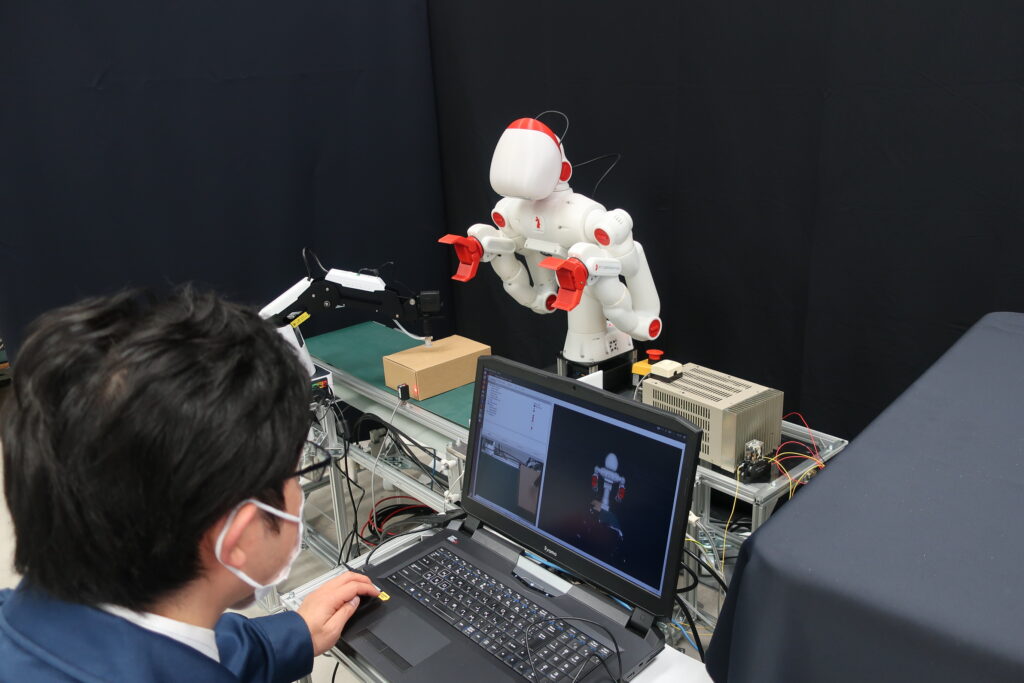
双腕ロボットによるピック&プレイス(大阪産業技術研究所提供)
※1 Descartes(デカルト)
軌道生成ライブラリの1つ。Descartesは、溶接などの手先の経路や姿勢の制御が必要な作業を、アームロボットに行わせるために開発された軌道生成ライブラリです。
(大阪産業技術研究所テクニカルシート「ROS を用いたアームロボット制御 2 モーションキャプチャを用いた動作教示」より引用)
※2 PCL(Point Cloud Library)
Point Cloud Libraryは、(OpenCVと同じように)数々の処理モジュールから構成されている、C++言語による大規模点群処理ライブラリです。ロボットビジョン(ロボットが自立的に作業するための眼として使うアプリケーション)、および(ロボットではないが、デプスセンサーと計算機で点群を処理する)3Dコンピュータビジョンや、その他3D処理目的に使用できる3D点群処理が数多く格納されたライブラリです。
(Point Cloud Consortium PCCブログより引用)
ハードウェアの開発
宮島様:公開されているSciurus17の3D CADデータで、ハンドにぴったり合うアタッチメントを簡単に作ることが出来ました。ペンを持つ角度を変えたい時もCADで出来るので、スムーズに物を作ることが出来て非常にありがたいです。
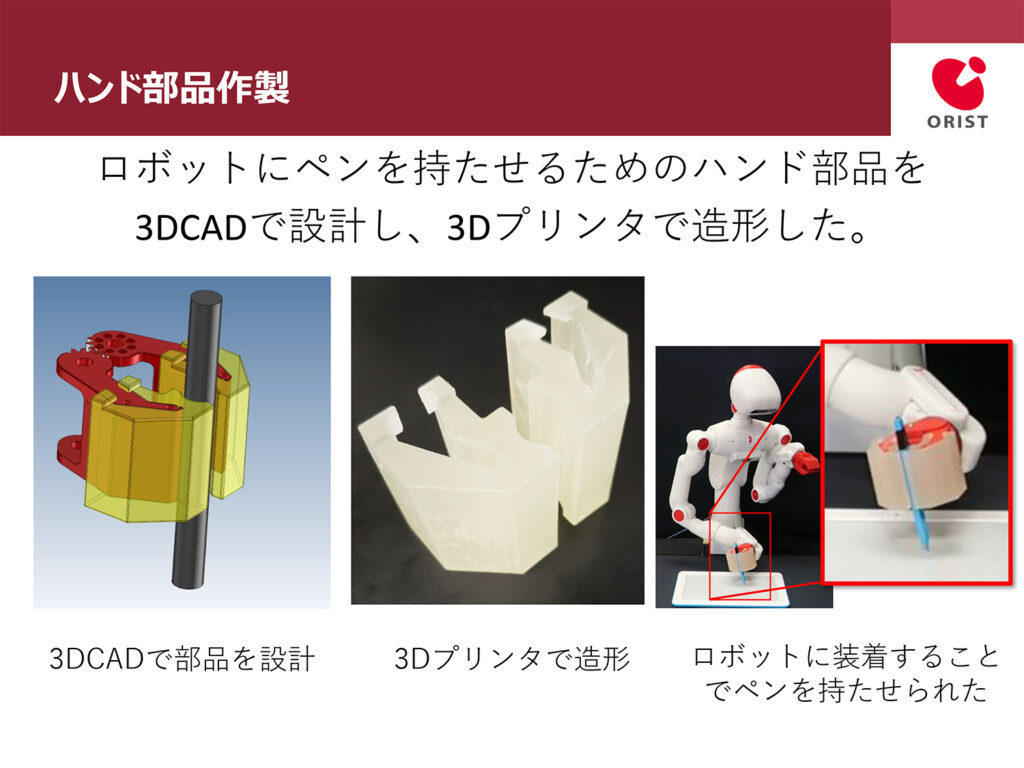
ハンド部品作製(大阪産業技術研究所提供)
使用時に困ったこと
宮島様:3Dプリンタで作っているので仕方ない部分はあるのですが、Sciurus17のハンド部分の歯車の強度が弱くて部品が壊れ、何度か替えの部品を頂いたことがあったので、そこの強度は若干心もとないなと思っています。
また購入して5年も経つので、腕のところに若干のひび割れが入りつつあります。もちろん金属で作ると現在の価格では提供できないと思うのですが、やはり長年使って経年劣化が見て取れるのが今の心配事です。
開発で苦労したこと
宮島様:一番苦労したのはDescartesを使いこなすところです。モーションキャプチャは性能がいいものを使い、ペンの軌跡もしっかり取れたので、モーションキャプチャからデータを取るという点はそこそこ良いものが出来ました。それを使ってどう綺麗にロボットを動かせるかというところで苦労しましたね。
Descartesでどういうデータが出来るかは、1回データを再度見直さないと分かりませんでした。
アールティさんが作ったシステムにどう繋げるかという部分で、自分で中身を全て確認しないといけなかったので、そこを理解して行うまでが一番大変でした。
データの中身の確認をしてどれくらいの重さのデータを入れ、どういうデータに変換してROSコントロールに流すかが分かれば、あとはプログラムを自分で調整する段階に入ります。
ROSは機能単位でソフトウェアを分けて開発できるので、プログラムの途中の部分だけ置き換えればいいというROSの強みが出て、最終的にその程度の苦労で済みました。
赤井様:人の作業を自動化できればと思ったのがきっかけですね。テレビ番組で、新幹線の先頭の丸い部分を人が手で叩いて板金加工していたのを見て「人が何かを持って道具で作用する動きを自動化したい、ロボットに置き換えたい」と思ったのが一つの開発コンセプトになっています。
手で物を押さえてハンマーのようなもので叩くことは、実はかなり難しいんです。
その動きのファーストステップはどんな動きかを考えると、人がペンで字を書く動きは「道具で何か対象物に作用する」という点で本質的には同じだと思い、紙に字を書くという動きをやらせようとなりました。
赤井様:そうなんですよ。ハンマーで物を叩いて金属を曲げるには、Sciurus17の出力が足りなくて出来ないのですが、やることは基本的に一緒です。
そこから金属を叩く力や、押さえる力や、反力をどう支えるかなど色々な研究の課題がありますので、そこはこれからです。
ROSを使ったロボット制御の導入支援について
赤井様:そうですね。ROSに関して「名前は知ってるけど…」という方もいらっしゃいますし、需要はこれからという気がしています。
一方、ロボットをやっていない方で、SLAMなどのロボット技術を使いたい方もいらっしゃいます。
ROSの研修をご提供することもあるのですが、メニューに関してもアームや双腕ロボットを実際に扱うのではなく、まずはソフトウェアの面からやらせていただくことが多いです。
ロボット制御となるとこれからかなというところです。
ROSの3D視覚化ツール「RViz」(アールティGitHubより)
赤井様:それもありますが、サポート状況なども考慮しています。私は現在ロボットのピッキング絡みで深層強化学習の研究をやっているんですが、そうなるとPythonなどの言語で書かれた、深層学習に特化したライブラリとROSを合わせないといけません。
今後の拡張性を考えた時に、サポート終了などでROS 2に移行せざる得ないという状況が恐らく来ると思い、ROS 2での開発を始めました。
また産業用を考えたとき、もう少し時間がクリティカルになる動作をロボットにさせないといけないので、リアルタイムに強いROS 2が必要になると思います。
あとは、センサ絡みを考えたときにmicro-ROSが使えることは非常に魅力的なのでROS 2を使っています。
赤井様:我々としては作ったものを見せていくしかないと思っているので、少しずつ色んなチャンネルを使いながらROSのことを広めていきたいです。
私個人としても色んなROSの勉強会に参加しています。
あとは実際のロボットを使ったデモを見せて「ここまで出来るなら、やってみよう」という思いを引き出す働きかけをしたいですね。
赤井様:中小企業の方から「自動化の相談をすると、SIerさんからライン全体をゴソッと全て入れ替える提案が多く、それだとコストが嵩んでしまう」というお話を聞くことがあります。
全自動化ではなく、テーブル上のひと手間や夜間にちょっと回す作業などの小規模な自動化がニーズとしてあると思っています。
例えばよく受ける相談は、「夜間、ロボットに検査をさせたい」とか「空き時間にちょっと何かをしてもらいたい」などですね。
人は労働時間が限られていますし、目も疲れてくるので、疲れないロボットに夜間何かをやってもらいたいという需要はあります。
それにプラスアルファで、ROSを使って自分達で触れるシステムが必要ではないかと思います。ちょっとした変更をプログラムと回路で出来ることを小規模な自動化を通じて知ってもらうことで、中小企業の方が「自分達で出来る。ならばもっと大規模なラインにロボットを入れても大丈夫なのでは」とステップアップしていただければいいと思っています。
それでも今までロボットを導入していない中小企業の方にはかなりハードルが高いと思われますので、そのハードルを下げるようなシステムやロボットが必要になります。
それをSciurus17に当てはめたときに、双腕だとどういったことをさせればいいのか?という疑問にお答えする事例があればいいと思いますし、Sciurus17だからこそ作れるデモや事例もあると思います。
赤井様:そうですね。例えば、ベルトコンベアに流れてきている荷物をセンサで止め、Sciurus17に少し仕事してもらってコンベアに流してまた別の所に置くというデモ(※3)を通じて「ROS 1とROS 2を組み合わせて1つのシステムで出来る」という所をお見せしたいと思っています。
※3 近日YouTube動画公開予定
自動化システムユニットの設計・製作 開発の様子(大阪産業技術研究所提供)
今後の展望
赤井様:始めの方でお伝えしたことの繰り返しにはなりますが、プロジェクトで蓄えた研究成果を発信していくのが次の段階だと思っています。我々が色んな所で発表したり、今後企業の方と共同研究をリリースしたり、研修という形で我々の持っている技術シーズをお伝えしたり、まずはROSを知るところから始めていただくような活動になると思います。
赤井様:そうですね。空き時間にちょっと作業してもらうとか、何か大量のものを、難しいピックアップではなくて、バラバラにしておくとか。人がやるのは面倒くさいけど、ロボットが夜間にやってくれたらいいよね、というちょっとしたものが需要としてある気がします。
中々日常業務で面倒くさいことだと思うんですが、慣れた現場ではそれをロボット化出来るとは思っていないかもしれないなと思うんです。
そういう潜在的に面倒くさい所がロボットによって解決出来たら嬉しいなと思っていただく。それが我々がデモを見せたり情報発信する1つの意味かなと思います。
最後に
今回大阪産業技術研究所の皆さまにお話を伺い、「中小企業の方にいかに使ってもらえるようにするか」「中小企業の方にいかに知って頂くか」とユーザーに焦点を当てて組織理念と共に研究されている点が非常に印象的でした。
個人的な話で恐縮ですが、今回インタビューを担当した渋谷は昨年洗剤自動投入機能がついたドラム式洗濯機を購入しました。
使うまで洗剤の自動投入がここまで便利だと思いもしませんでした。
買い替える前は「1回1回洗剤を量る」ことは大した手間だと思っていなかったのですが、いざ自動化を体験すると、どうして今までこの仕組みが無かったんだとさえ思います。
まさに、インタビューの中であった「自動化できるということへの気付き」の重要性を感じます。
ロボット業界ではROSの知名度や需要が広がってきましたが、まだ工場等への現場導入例は多くなく、ROSの便利さを知ってもらうための活動段階です。
ですが、大阪産業技術研究所をはじめ世界中の研究機関、ロボット関連企業の働きかけを通じて、今回お見せいただいたデモのような事例が、中小企業のライン等で採用される日も近いと思います。
そのための研究開発において弊社のSciurus17をご活用いただけていることを誇らしく思います。
大阪産業技術研究所の皆さま、お忙しい中インタビューにご対応いただきましてありがとうございました。
取材協力:大阪産業技術研究所
Sciurus17
頭部に3次元距離カメラ搭載。位置・速度・電流(トルク)制御を選択可能な上半身人型のヒューマノイドロボット。
※受注生産品(通常納期約3ヵ月)
※RT ROBOT SHOPからはご購入いただけません。下記製品ページよりお問い合わせください。


