
こんにちは、アールティ営業部の渋谷です。
アールティの研究開発向けロボットをご利用いただいているお客様に、実際の使用感やロボットを使った研究開発の内容を伺うインタビュー企画後編です。
立命館大学 総合科学技術研究機構 准教授の萩原良信先生と、立命館大学大学院 情報理工学研究科に所属する長谷川さんにお話を伺いました。
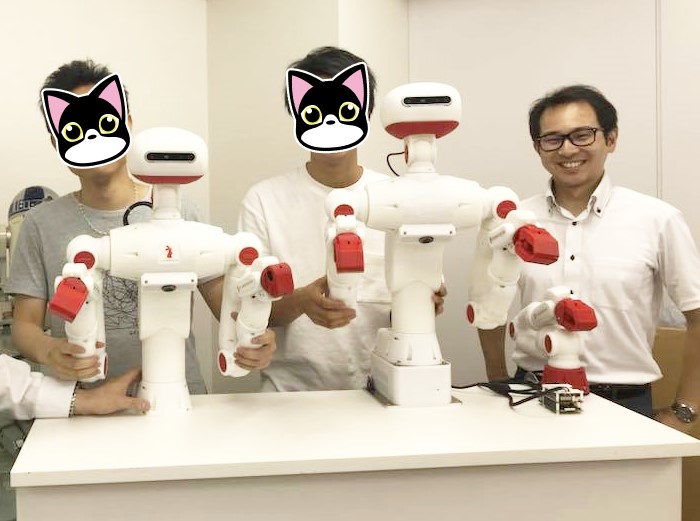
萩原先生とSciurus17、CRANE-X7
前編はこちら

Sciurus17使用レビュー
萩原先生:私は13年程前からロボット競技のロボカップに参加していて、その頃からアールティ製品を買っていたので研究開発用ロボットとして製品に信頼を置いていました。
研究用に購入するときに、ROSでしっかり動いてサンプルもあり、そしてサポート情報が公開されていることが条件でした。
その辺りを重視して探した時に、アールティの中川さんから話があって「これが一番良いかな」と。
萩原先生:Web(GitHub)でサポート情報が公開されているのは非常にありがたかったです。Sciurus17は3Dプリンタ製なので、故障時は自前でパッと作れて非常に助かります。
頭部や胸部のカメラも含めたシステム全体のROSパッケージもあるので、研究をスタートしやすい開発環境だったと思います。
長谷川さん(学生):新しく研究室に来た学生にとって、GitHubが参考になります。他社のサイトは更新が止まっていることもあるので、その点メンテナンスされていて良かったです。
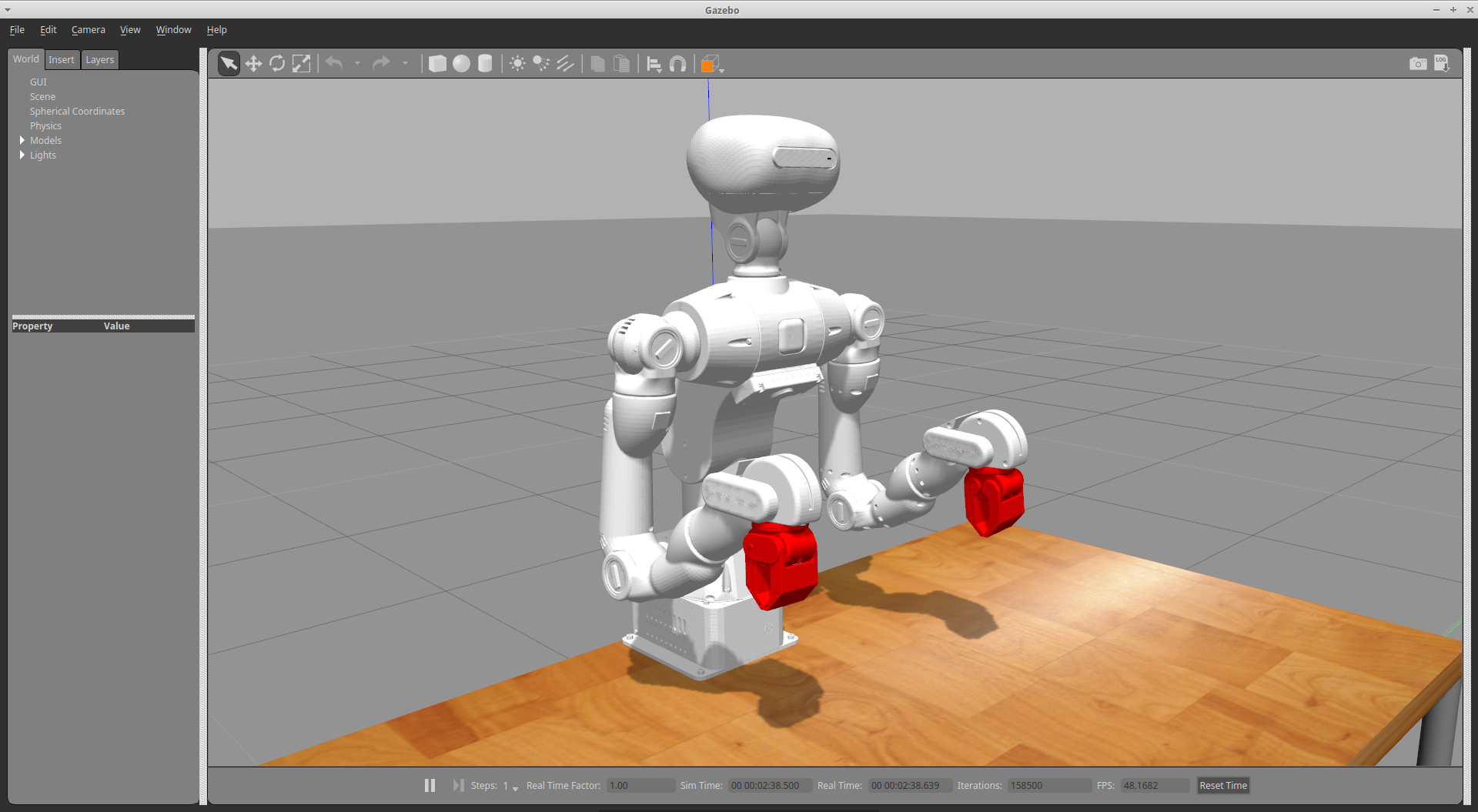
ROSベースでシミュレーションできるのも良いです。初学者はコマンドなどを覚えるのが難しいので、まずシミュレータで慣れてもらってから実機に移るようにしています。
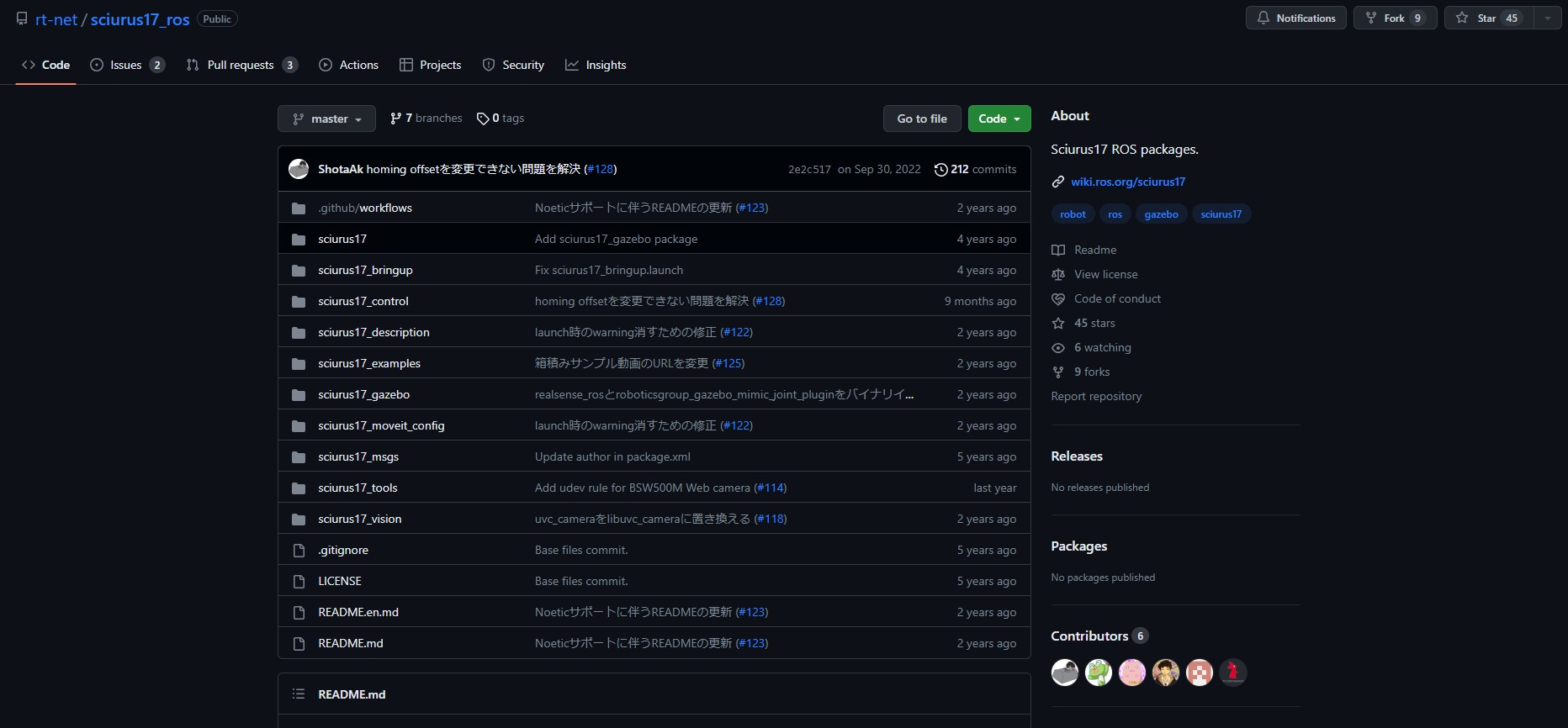
Sciurus17のROSパッケージ
他社のGitHubリポジトリは更新が止まっていて、READMEに書いてあるのに動かないということもあるので…。
また、Sciurus17のリポジトリは私が触り始めた当時、最新バージョンのNoeticで書かれていたことも参考になりました。
長谷川さん:Gazeboを立ち上げた時に茶色い箱が3個くらい置いてあるのですが、バリエーションがあるとより使いやすくなると思いました。
萩原先生:物体は色々なバリエーションがあると良いと思います。例えばYCB object and model set(※6)とか、研究に標準的に使われるような物体とデータのセットのモデルがシミュレータに入っていると、実世界での実験でもそのまま使えて色々なことができるので、さらに面白いかなと思いました。
※6:YCB object and model set
アメリカの研究者の共同プロジェクトYCB Benchmarksが、ロボット競技会や研究開発において一定の条件で比較をするため、物体の実物とオブジェクトデータをセットで提供しているもの。https://www.ycbbenchmarks.com/

出典:https://www.ycbbenchmarks.com/
萩原先生:やはりサポートですね。特に学生と一緒に進める研究開発では、手厚いサポートが欠かせません。
ROSを初めて触る学部生がサポート情報のサイトを見て独学で動かせるような、手厚いマニュアルと管理されたソースコード、充実したQ&Aが重要です。
そういう意味で、技術をちゃんと理解している人によってGitHubが管理・維持されているのが一番大事かなと思います。
また、アーム型のCRANE-X7の方の話にはなりますが、細田先生が書かれた教科書があるので、マニピュレーションの部分でも深みというかリサーチ的なアプローチが出来るのも強みかなと。
研究の先に見据える未来
萩原先生:壮大な話ですが、AI・ロボットもひとつの知性であり、その知性は人間の知性と融合していく時代になっていくと思うんです。
その中でAI・ロボットとのコミュニケーションを数理・計算論モデルにより分析し、理解する事が重要になってきます。
その挑戦のひとつが、現在研究している「人とロボットの言語的なコミュニケーション」なんです。
人間は、言葉を発話したり、聞いたりするコミュニケーションによって、自己の認識をダイナミックに変容させています。
同じことが言語情報や視覚情報、触覚情報から学習するAI・ロボットにおいても言えます。
このため、人とAI・ロボットを含めたマルチエージェントの記号創発システムを考え、このシステムにおけるコミュニケーションのダイナミクスを計算論モデルを用いて捉えていきたいと考えています。
これにより、人間とAI・ロボットのコミュニケーションにおいて、どのような発展が期待されるのか予測したり、現在起こっている問題を分析して原因を推定する事が可能になると期待しています。
萩原先生:基盤モデル(※7)が出てきたので、ロボットが常識的な知識を持った状態で環境に出て様々な仕事が出来るようになると思われます。また、現場環境で身体経験から学習するモデルと基盤モデルを融合する事により、効率的な環境適応が可能になると思われます。
※7:基盤モデル(Foundation Model)
ラベルなしの大量データを使って事前学習し、その後、幅広い下流タスクに適応できるようにファインチューニングするという2段階の訓練工程を踏んだ、1つの機械学習モデルのことを指す。
(参考:ITメディア「基盤モデル(Foundation Model)とは?」)
現在は、基盤モデルを活用してオープンボキャブラリで多様な言語命令からフェッチアンドキャリータスクを実現する研究などに注目しており、言語情報に基づいたモデル間・ロボット間での知識転移に興味があります。
萩原先生:そうですね。理論的には複数台への拡張は出来ているので、将来的には、2台3台といわず100台とか、そのくらいの規模での知識転移や記号創発の実験を行いたいですね。
最後に
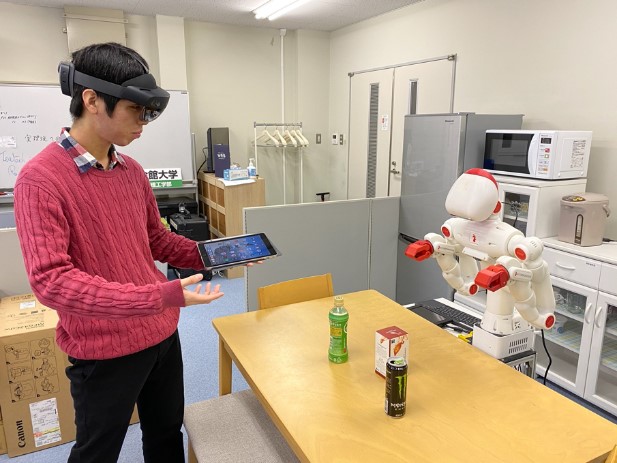
テーブルに置いている物体を人がSciurus17に教える
「人間がロボットにテーブルの上にある物体について教える」という近未来的な写真が印象的でしたが、お話を伺うと「言語が生まれたメカニズム」を解明しようとする研究でした。
それが文化人類的な見地からではなくて、ロボットを通じて明らかにしようとするというアプローチを興味深く伺いました。
萩原先生が「身体なくして知能なし」と仰っていましたが、アールティもAIと身体の関係性を重視して、身体知を含めたAI開発を長年手がけている強みを生かした「AIのボディとしてのロボット」を提供しています。
そんな製品を、実際に萩原先生にご活用いただけていることが大変嬉しいです。
萩原先生、長谷川さん、この度はインタビューにご協力いただきありがとうございました!
今回ご紹介した製品の紹介です。
Sciurus17
頭部に3次元距離カメラ搭載。位置・速度・電流(トルク)制御を選択可能な上半身人型のヒューマノイドロボット。
※受注生産品(通常納期約3ヵ月)
※RT ROBOT SHOPからはご購入いただけません。下記製品ページよりお問い合わせください。
https://rt-net.jp/products/sciurus17/
萩原先生プロフィール
立命館大学 総合科学技術研究機構 准教授
研究分野:記号創発ロボティクス、知能ロボティクス、知能情報学、ロボットビジョン
ホームページ:Yoshinobu Hagiwara’s website
Twitter:@y_hagiwar
取材協力
立命館大学 総合科学技術研究機構
https://www.ritsumei.ac.jp/research/center/sci/


萩原先生には、Sciurus17の発売直後で使用実績がほとんど無い中で選定・ご購入いただきましたが、どの点が決め手になりましたか?