はい、今週は台風4号ですか? 先週も台風でしたね?
そろそろ勘弁して下さい、低気圧苦手なのです。(泣) 注:台風シーズン突入です。
そんな台風の合間を縫ってマイクロマウス合宿に行って来ました。
主な任務は全員を無事に届けるという重大な任務です。運転手とも言います。
今回はじめてクラシックマウスをいじってきたのですが、サナエさんからサンプルを頂いてたのでまずこれで調整し、走らせてみる。 うーん、安定して速いなぁ。 と現状を把握してこれは使わず自分でプログラミングという選択肢を選んでみたのですよ、今までハーフマウスで使ってたプログラムを移植して挑んだわけですけどやっぱ2年育てたマウスに叶うわけもなく、探索しか出来ませんでした。 ここは精進するとこです。
で、得意分野に戻ってきて2足ロボ製作、今回は腕部を組み立てていきます。前回掲載したボディ編はこちらを参照してください。
使用する工具や部材はこちら。
- +ドライバー(細いの(プラスドライバーの0番といいます。)と中くらいの(同じく1番といいます)) 中くらいのはサーボホーンのネジを外すのに使います。
- ソケットドライバー(M2ナット用) 中継ハブやフレーム同士の固定の際に使用します。
- M2x5ネジ(低頭、もしくは超低頭) フレーム同士の固定に多用します。
- M2x6ネジ(低頭、もしくは超低頭) メインハブ、ひざ下フレームの組立に使います。
- M2ナット 至る所で多用します。
- スペーサー(内径2mm、高さ5mm)メインハブ固定用
- サーボモーター 今回は双葉電子工業RS304MD-FFを16個使用します。
- 中継ボックス TTL用TB22PPを6個使います。
- メインハブ G-ROBOTS メインハブ(TTL用)を1個使います。
- メインハブケース メインハブ専用ケース、あると固定がとっても便利
- ケーブル 双葉電子工業CC-E3P3-300を6本、でも長いので自作でも。
- コントローラー RPU-11を1個使います。RPU-10でもOK。
これ以外には付属のネジで間に合います。
では組立作業に入ります。
まず胴体と腕を繋ぐために肩部分のオフセットアームを肩ピッチ軸サーボに固定します。
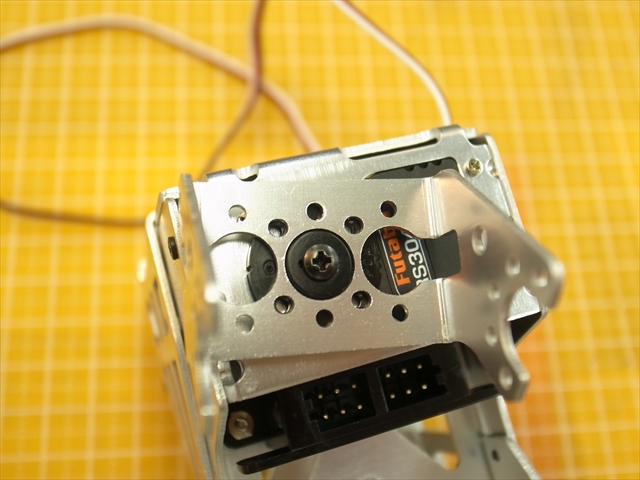
ホーンにM2x3タッピングビス(付属の黒いネジ)を締め付けていきます。
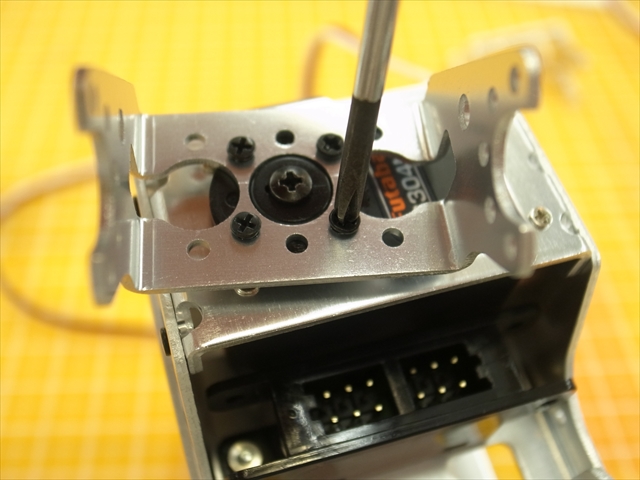
この時なのですが、相手のサーボホーンは樹脂なのでネジ山を切りながら締め付けるのですが、よく見かけるのはグイグイと締めていくやり方、人によってはラチェットドライバー(カリカリ音のするドライバー)で締めているヒトもいます。楽ですよね?♪
でも、このやり方は正直お薦めしません。
一気に締めていくとネジとホーンが熱を持ってしまい、そのまま締め付けていくとネジ山が形成されないまま締まっていき、温度が下がって樹脂が落ち着いて固定されますが、ネジ山がきっちり出来ていないので負荷がかかった時に突然ネジが抜けます!ネジ山ごと持っていかれるのでホーンの再利用は不可能となります。
トラブルを未然に防ぐタッピングビスの締め方としては
- 慌てずゆっくり落ち着いてネジ締める。
- 1回転閉めたら半回転戻す、これを繰り返して締めていく
- ラチェットや電動ドライバーは我慢して封印(楽なんですけどねー)
これだけで余計なトラブルはある程度防げるので参考にしてみてください。
(うちのRIC30デモ機は樹脂ホーン部分のトラブルは2年で一度も発生していません)
ってことで締め付けていきます。
反対側にも取り付けます。
続いてひじブロックを組み立てます。
オフセットアーム、ブラケットC、中継ハブステーを使用します。
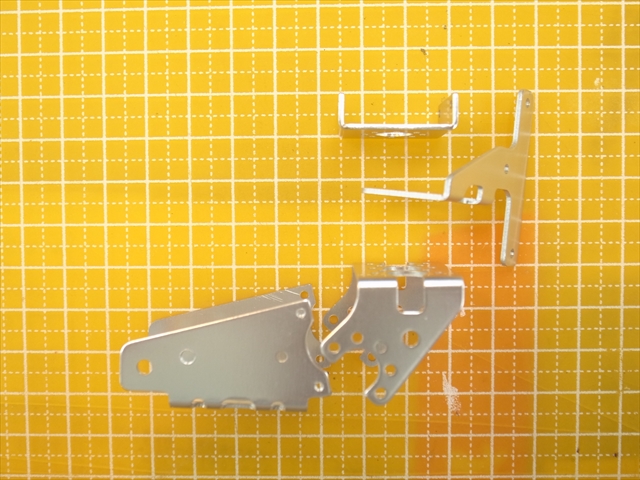
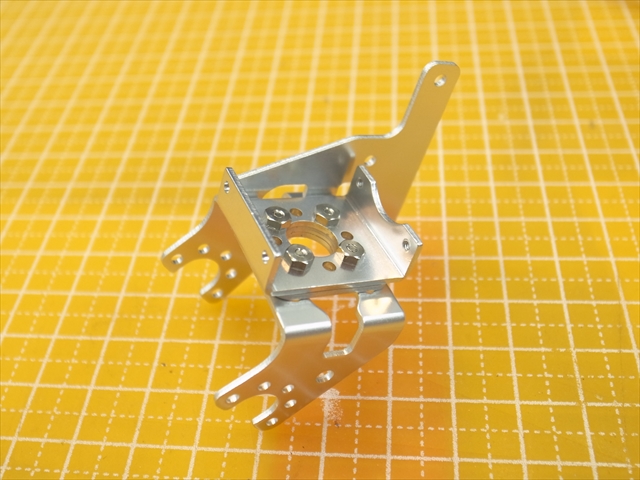
M2x6とM2ナットでこんな感じに組み立てます。(左腕用)
ネジロックを使っておくと外れにくくなります。あとから締めようとすると腕部をバラすことになるので、先手を打ってネジロック。
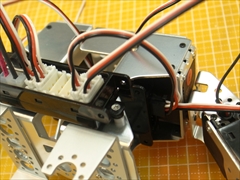
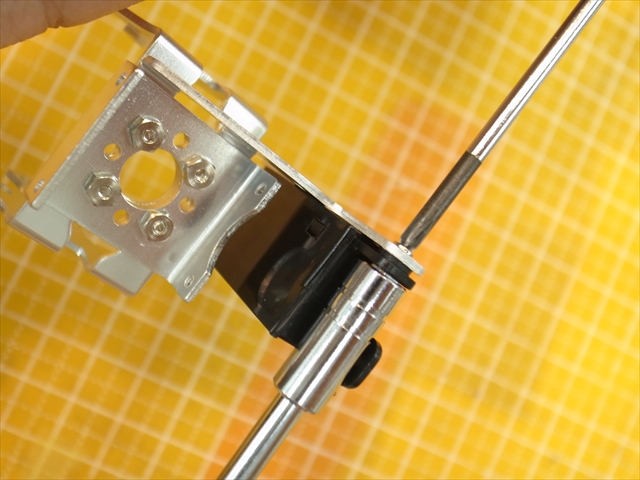
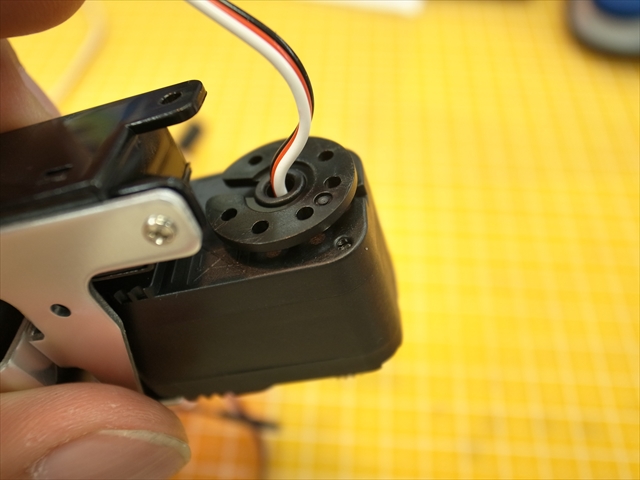
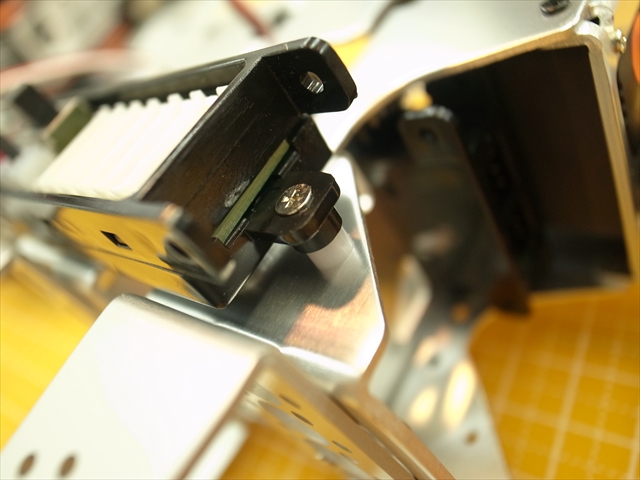
続いて中継ボックスを固定します。

↑の中継ボックスですが、一部分だけ耳を切り飛ばしています。
腕を上げる(ロール軸を上方向に動かす)際にホーンと干渉するので切っています。上げなければ切る必要ないです。
そしてM2x5ネジとM2ナットで固定します。ピンセットでも出来ますがソケットドライバーがあると捗ります、すごく。
サーボを固定していきます。腕先にはG-Dogフロントレッグを使用しています。
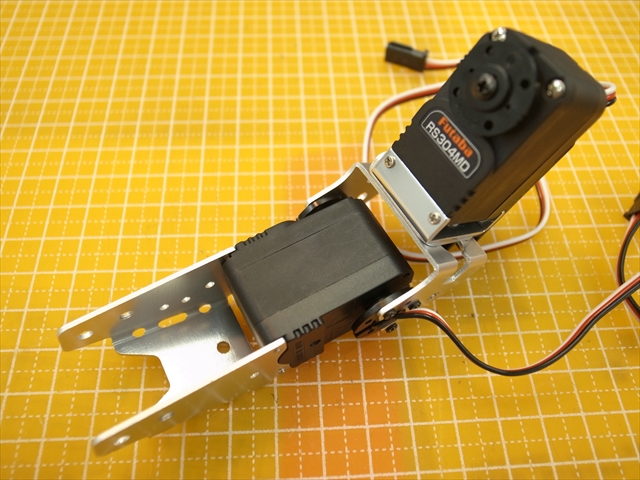
G-Dogフロントレッグは左右があるのでお間違えなく。片側にだけネジが切ってあります、切ってある側がサーボの裏側に来るように固定します。
腕先は色々とカスタマイズしやすいポイントです。G-Dogリアレッグにすると若干長くなったりします。
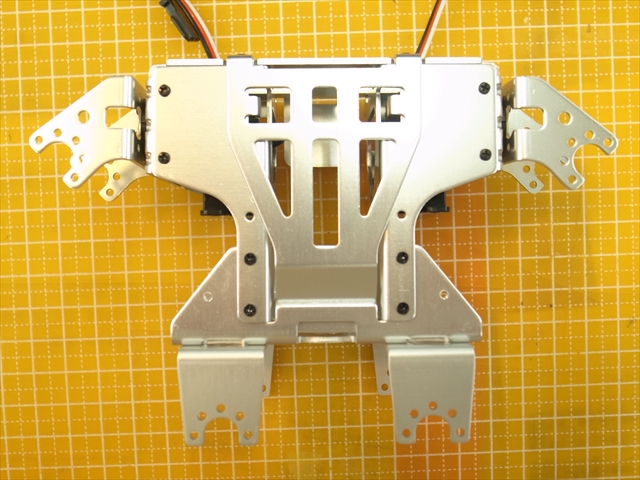
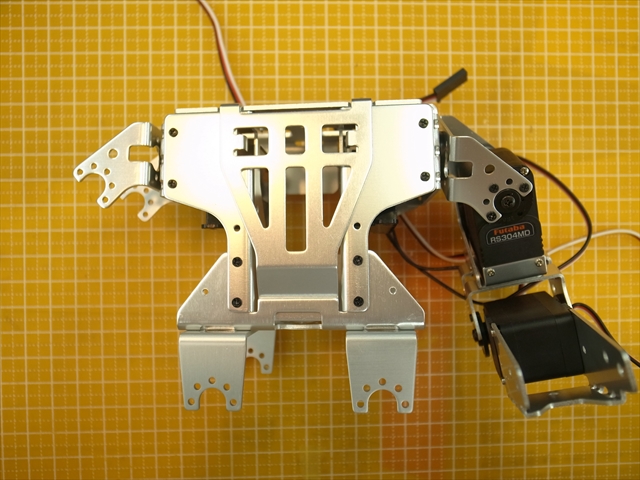
出来た腕部を胴体にくっつけます。これを………
ここへっ!
付いた!
右腕も組み立てていきます。
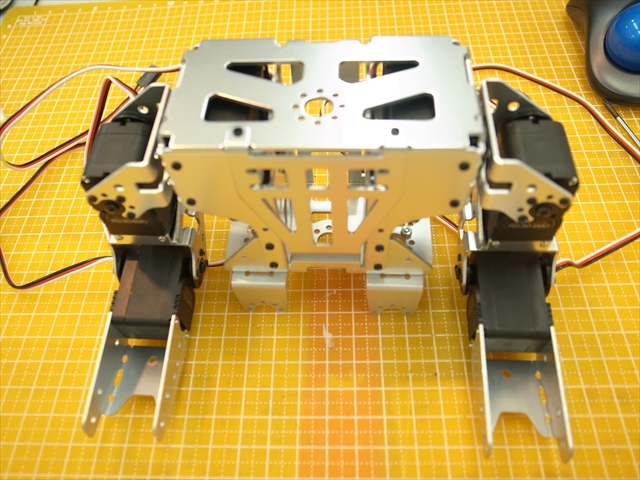
3分クッキングばりのノリで完成。
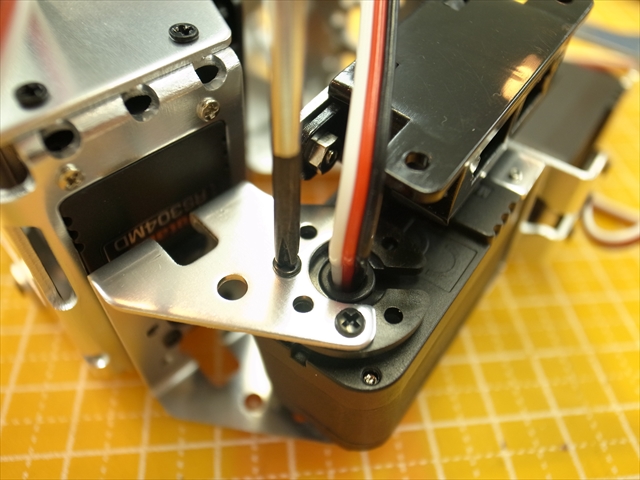
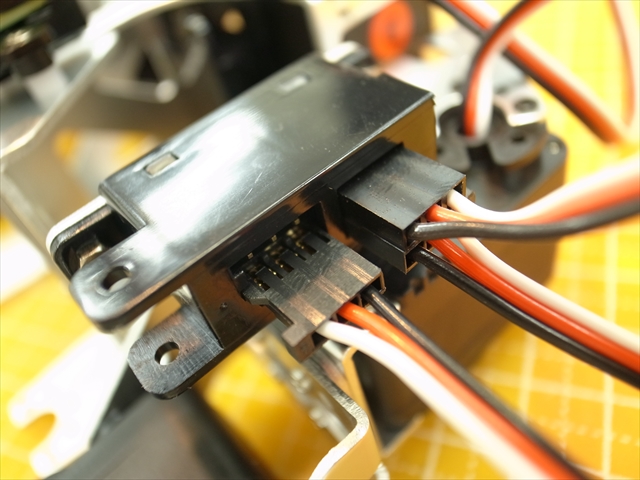
次に配線を集約するメインハブを取り付けていきます。
メインハブとメインハブケース、5mmスペーサーを使います。
背面に寸法に合わせた穴があるので、このように組み付けます。
ネジはM2x8程度でOK。ネジロックを使っておきましょう。
では、ケーブルをハブに繋いでいきます。
肩ロールとひじのサーボのケーブルを腕部の中継ボックスに挿して3P-4Pケーブルを挿し、メインハブへ挿していきます。
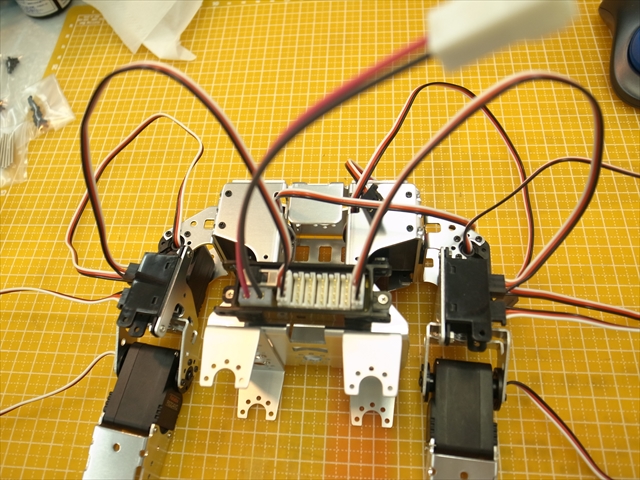
こんな感じ、茹で上がってないパスタを引き上げるとこんな感じにしなりますよね?
気になりますけど最後に束ねていきます。
ここまでで上半身と腰は完成したので、次回は脚部を組み立てていきます。
来週も台風ってことはないよね?(泣)
 RIC30 |
 RS304MD-FF |
 【G-ROBOTSアルミパーツ一覧】 |

