
こんにちは!
最近少し夏バテ気味の松崎です…><
肉…肉が足りない…。。
いつも自分でお弁当作ってきているのですが、今日は自分に甘く!
カレー(アールティでは毎週金曜日にカレーを食べます)を頼んでしまいました^^えへへ
ということで、そんな夏バテさんでもPCひとつ(厳密にはもう少し道具要るか…)でできる夏休みのお楽しみ。
「ちょろ丸」の経過レポートです♪
今日は、前回かなわなかった「トリム調整」を完了し、歩行までするのが目標です。
前回はハード作成時に飛ばしてしまっていた手順があったことが判明したので、
きちんと済ませて組み立てなおしました。
これでハードには何ら問題がないはず。
説明書をよく読んで、指示通りトリム調整を行ってみます。
ですが、足がやはりぎりぎりといって、通信ターミナルを使用しようとしてもきかないみたいです。。
また、本来ならトリム調整時はぐっと固まって動かないはずの足が簡単に動かせてしまいます。
ここで松崎のキャパシティをオーバーしたので、のり先生に教えを請いました。
のり先生によると、このもろもろの不具合の原因は「電池の残量不足(電圧不足)」ではないかとのこと。
サーボモータが変な動きをしたり、本来は力が入っているはずのところに力が入っていなかったりという症状は
電池残量がない場合に散見される典型的な症状であるそうなのです。
電池残量が少なくなったときの症状として私のような素人が真っ先にイメージするのは「ぷすんぷすん…」というようなまさに「パワー不足」の症状です。
「変な動きをする」という発想がなかったので、ちょっと新鮮な感覚!
ということで、のり先生のお告げ通り電池を換えてみたところ、説明書どおりに手順が進みました。
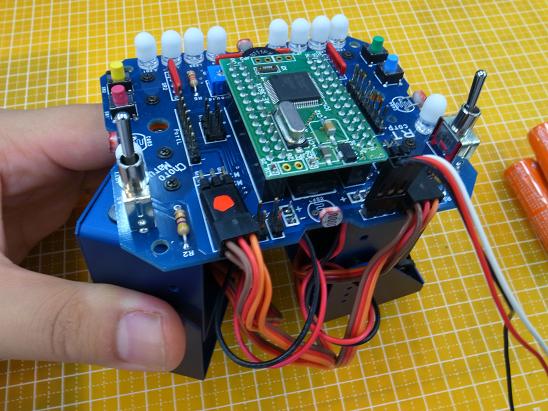
下の画像のように微妙に足がズレちゃってるちょろ丸くんをきちんと直立するように調整します。
ちょろ丸のサーボモータは4つ。
この各サーボモータをそれぞれ「U(up)」「D(down)」のキー操作で動かします。

ここで「ぴしっ」とちょろ丸くんの直立が決まった時の各サーボモータの値を
サンプルプログラムの「歩行モーションテスト」の「choro.c」ファイルに書き込みます。
※書き込むところは下の画像の40~43行目に当たります。
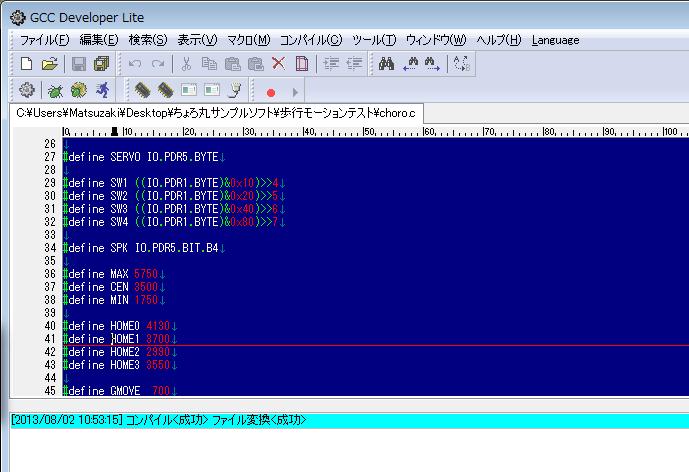
値を書き入れたら、「choro.c」を上書き保存(ビルドはしない)して、次は「main.c」ファイルを開いてビルド、書き込みします。
(書き込みモード、実行モードの切り替えとなるソケットの取り外しを忘れずに~!)
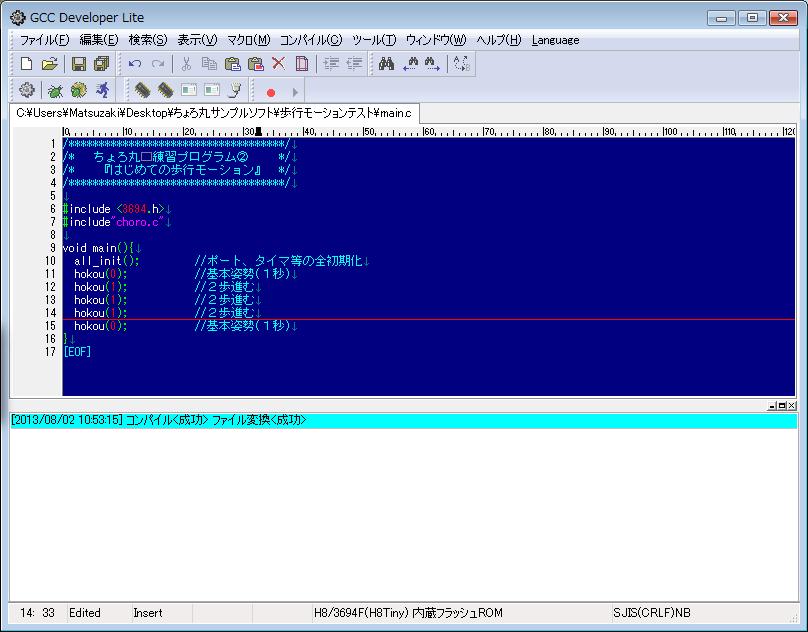
今回は、せっかくなのでサンプルプログラムよりも少し長く歩かせて見ましょうか^^
長く歩かせるには、下の画像12~14行目に当たる「hokou(1);」を増やせばよいだけです。
下の画像を見ていただければわかると思いますが、一行増やすと2歩余計に歩きます。
それでは、ちょろ丸くんの記念すべき初歩行(6歩)をご覧くださいw
結構ガシガシ歩くのね…
苦節(?)約一ヶ月、ついに初めて二足歩行ロボットを作ることができました♪
ん?しかし、ちょろ丸くんには4つのスイッチと明るさセンサーがあるぞ…。
次回はもう少しちょろ丸くんのポテンシャルを見てみたいなあと思います^^

