昨日で今年のマイクロマウス大会は終了しました。
参加された皆さん、運営していただいた皆さん、お疲れ様でした。
会場のアールティブースで、ニコニコ動画(大会中継していたので)を横目で見ながら、
ネコ店長と一緒にPi:Co Classicの宣伝を行っていました。
大会レポートは他の者に任せて、前回の続き。
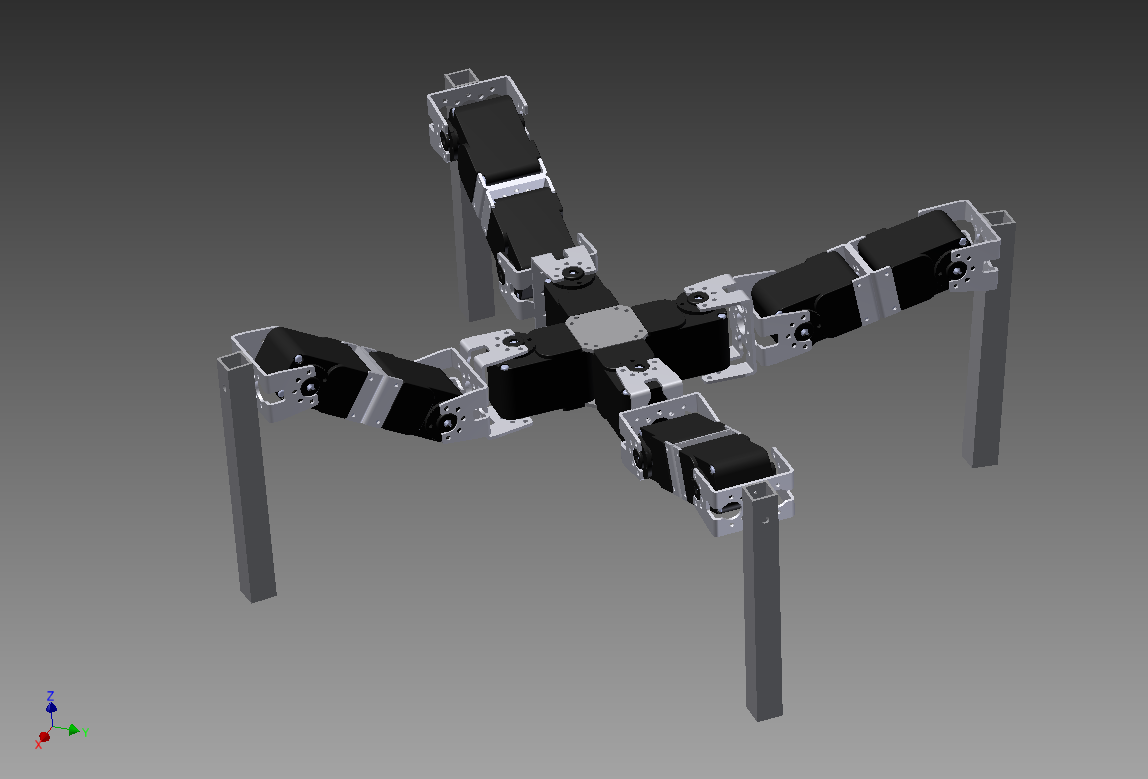
前回は2足歩行ロボットをデザインしたので、今度は4足をしてみました。
設計1時間縛りで、一応形になりました。

足は、汎用フレームとアルミ角パイプを100mmほどで切り出して、ネジで固定。足先はゴムで覆う感じで。
バッテリも、制御ボードも乗ってませんが、胴体の上に載せる感じでいいでしょう。
しゃがむと以下のようになります。
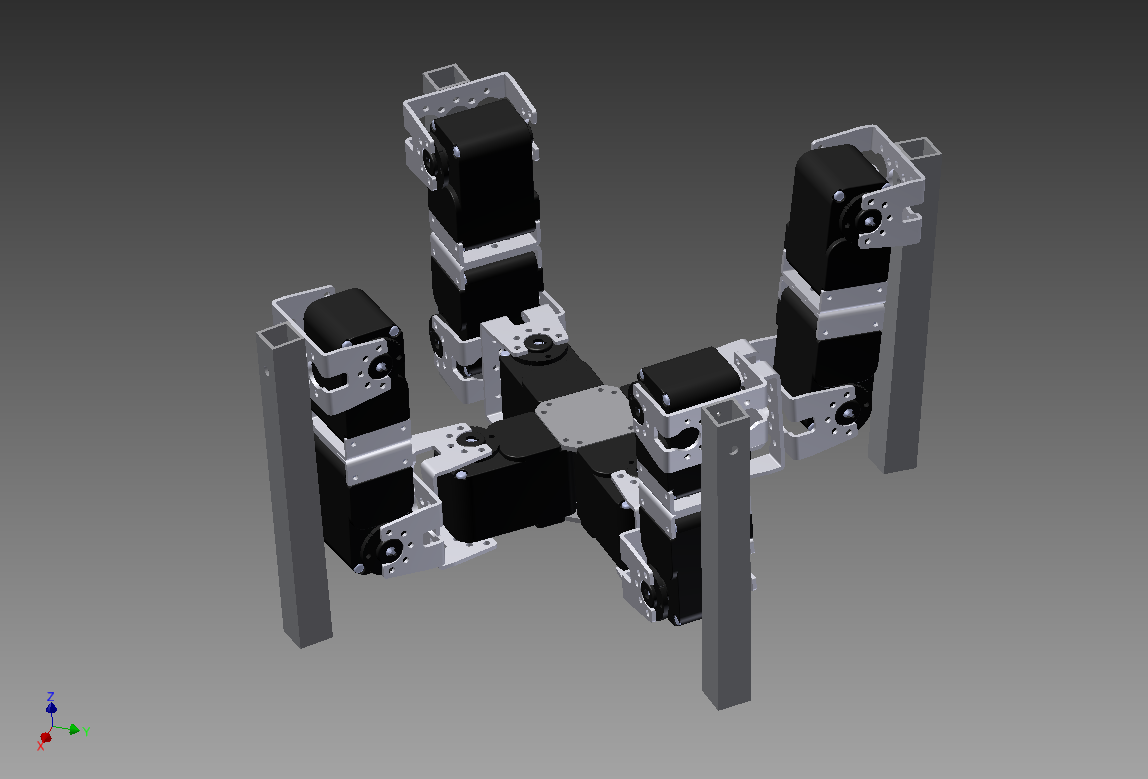
二足歩行ほど、リアルタイム性がなくても歩けると思われるので、
Bluetooth SPPで、パソコンやスマホから直接サーボモータを制御して動かすと、手軽に出来て面白そうですね。
 サーボモータRS304MD-H3bバルクセット (5個入) サーボモータRS304MD-H3bバルクセット (5個入) |
 HPI アルミフレーム HPI アルミフレーム |
 USBホスト機能搭載小型PIC基板 SBDBT USBホスト機能搭載小型PIC基板 SBDBT |

