今回は番外編として、SBGRBTを使って、BluetoothでパソコンとGR-001を接続します。
1.受信機RRC-R13を外す
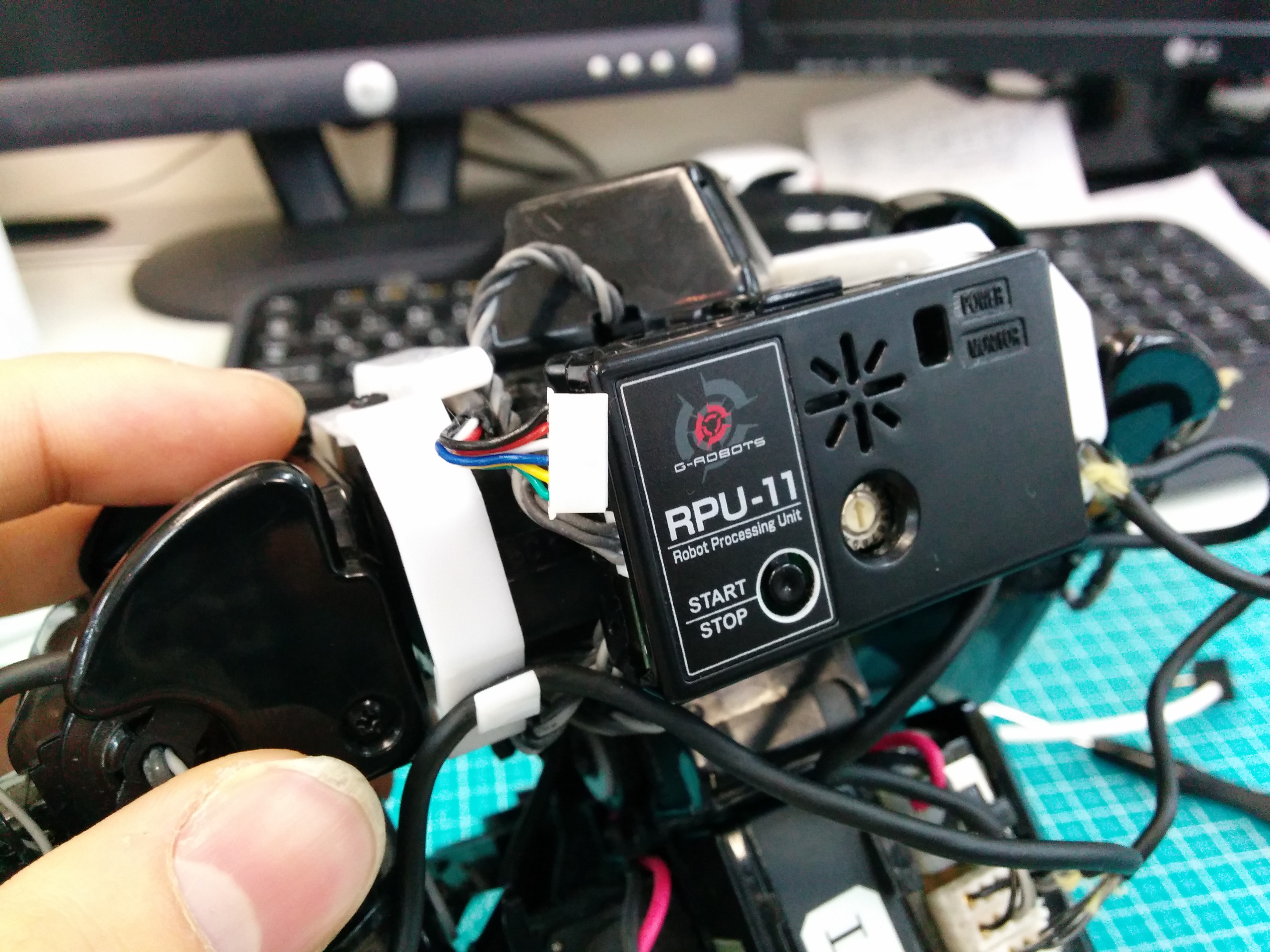
①コネクタを外す
受信機RRC-R13のケーブルが、コントロールボードRPU-11に接続されているので、それを外します。
②右肩カバーのネジを外す
白色の右肩カバーの上下に、2本のネジがあるので、それを外します。
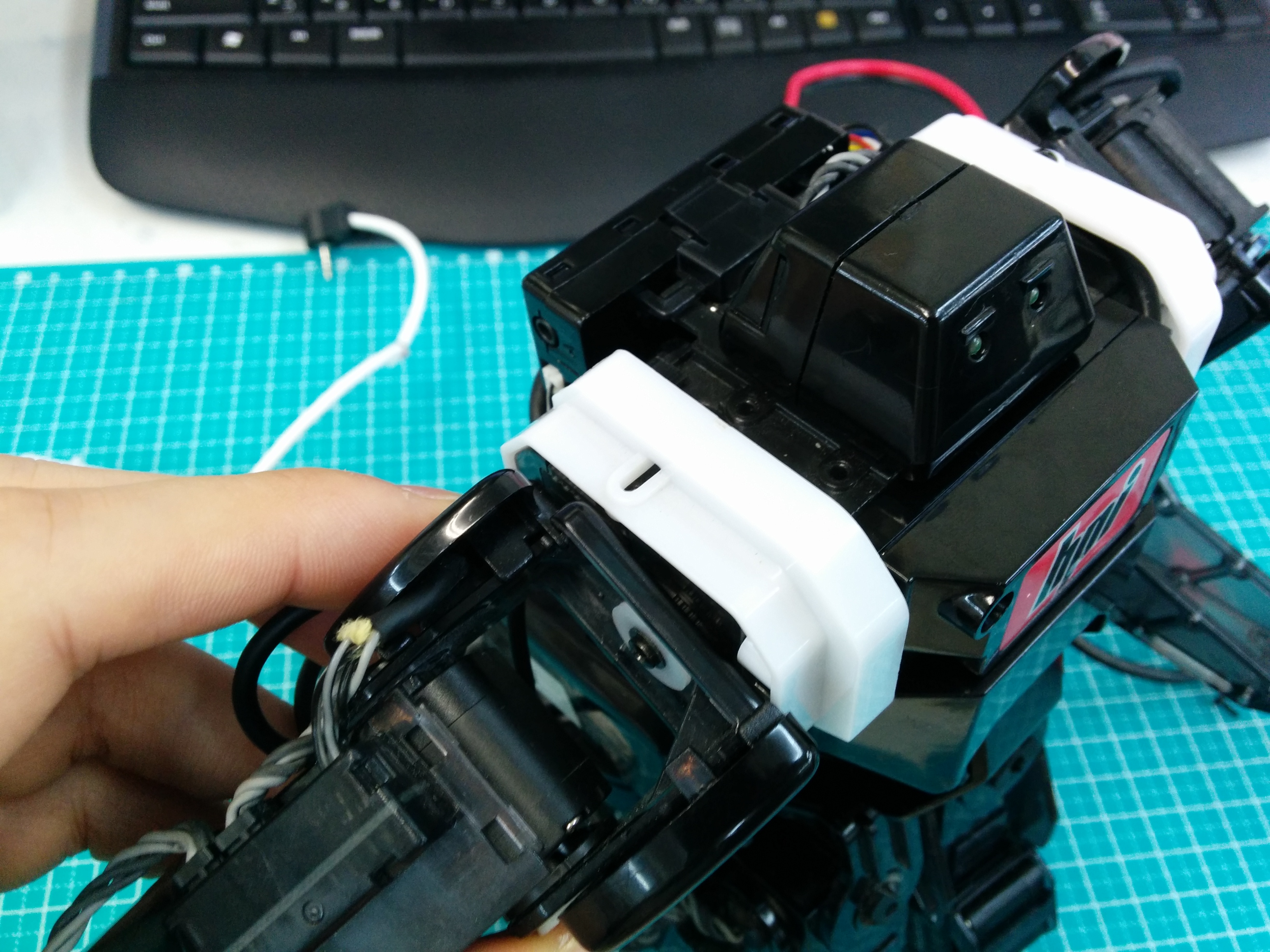
③右肩カバーを腕側に寄せる
RRC-R13を外すため、右肩カバーを腕側に寄せます。RRC-R13の端が覗き見えます。

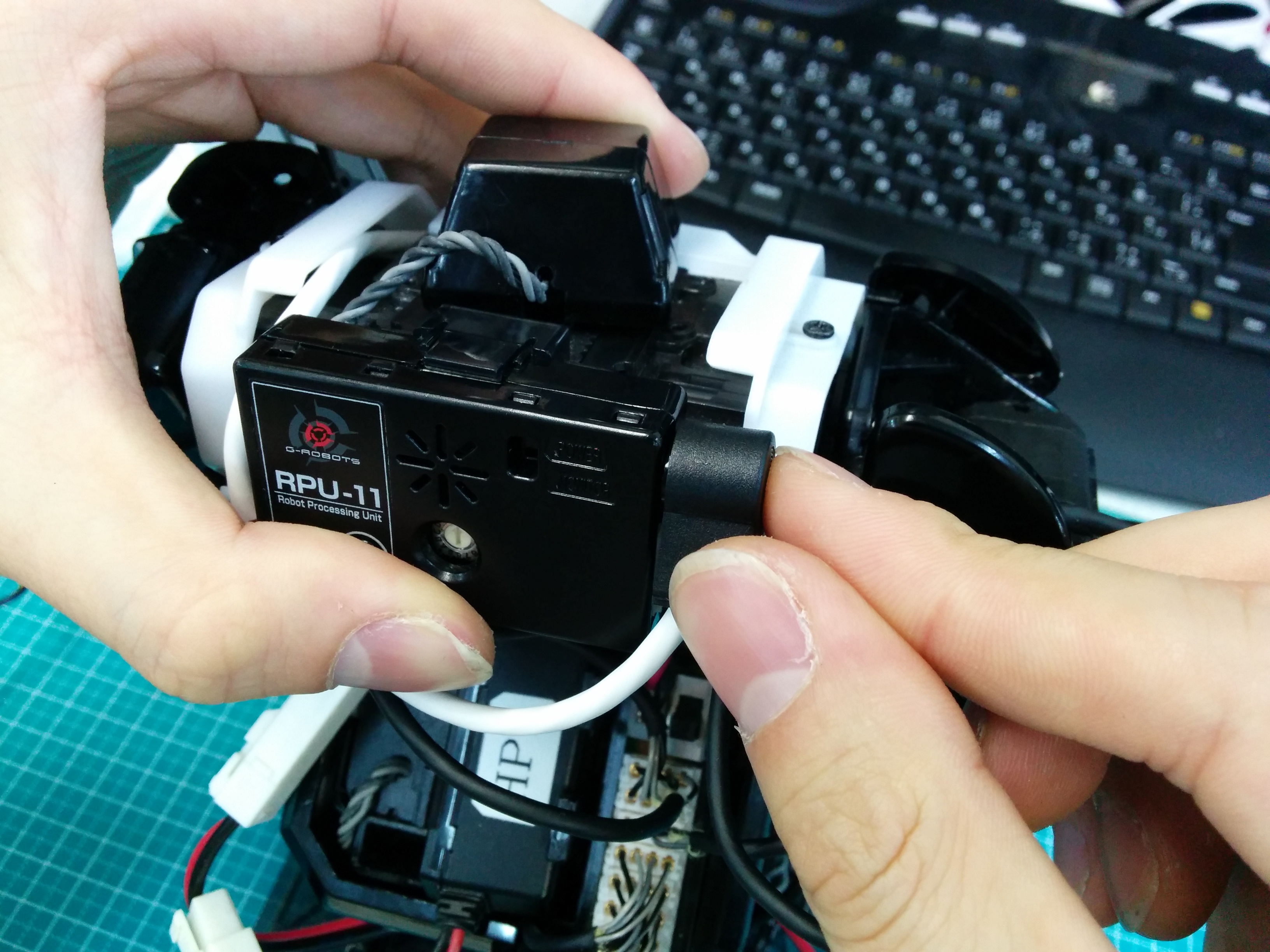
④#0マイナスドライバーを差し込む
写真の位置に、RRC-R13とGR-001の間に、#0マイナスドライバー(先の細いマイナスドライバー)を差し込みます。

⑤ドライバーで広げる
ドライバーを捻ると、テコの要領で、RRC-R13が外れます。
注)RRC-R13の固定用の爪が折れるかもしれないので、優しく行って下さい。

⑥RRC-R13を外す

2.SBGRBTを取り付ける
①SBGRBTのケーブルを左肩カバーに通す
左肩カバーの内側に、ケーブルを通すスペースがあるので、そこにケーブルを通す。

②SBGRBTをGR-001に差し込む
カチャっと音がするまで、SBGRBTをGR-001に差し込む。

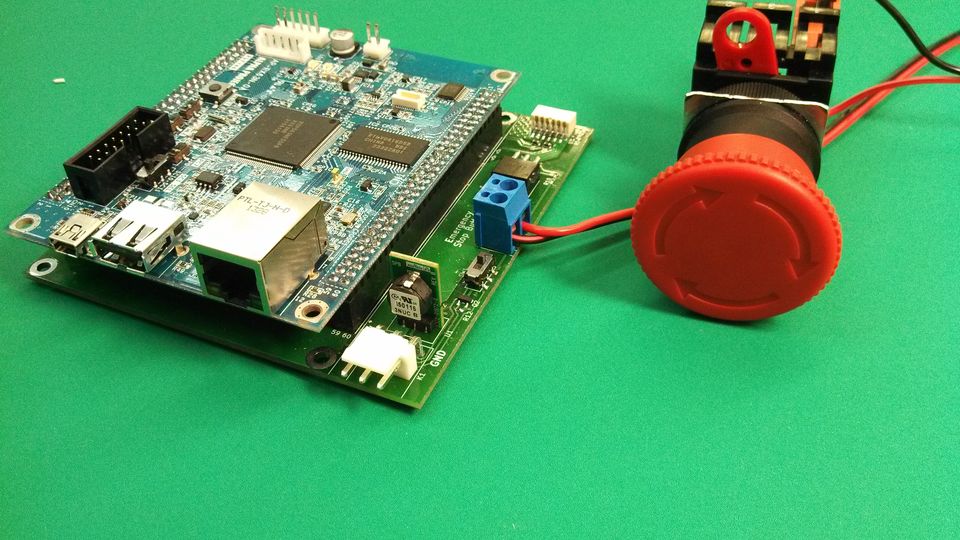
③電源用コネクタを差し込む
RPU-11のEポートに、電源用の4ピンコネクタを差し込みます。
注)コネクタの向きを間違えないようにしてください。

④通信コネクタを差し込む
RPU-11のAポートに、通信用のジャックコネクタを差し込みます。

後は、ロボットの電源を入れて、SBGRBTの橙色LEDが光っていることを確認します。

これで、ハードウェアの設定は終了です。
後は、パソコンとBluetoothの接続を行って、COM番号を確認すれば、OKです。