準備
DCモーター実験キットの内容

DCモーター実験キット
キットの他に用意するもの
Arduino Uno R3
USBケーブル(A-B)
Windows/mac OS/Linux のいずれかを搭載したパソコン
組み立て方
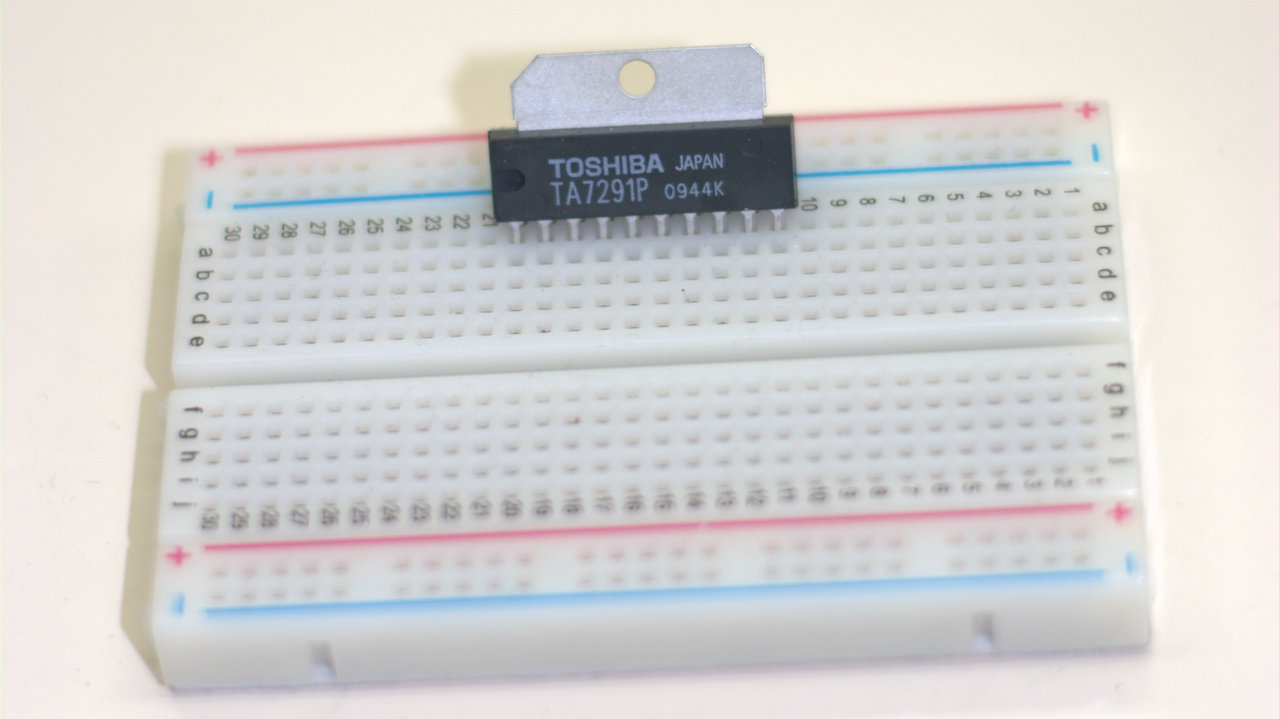
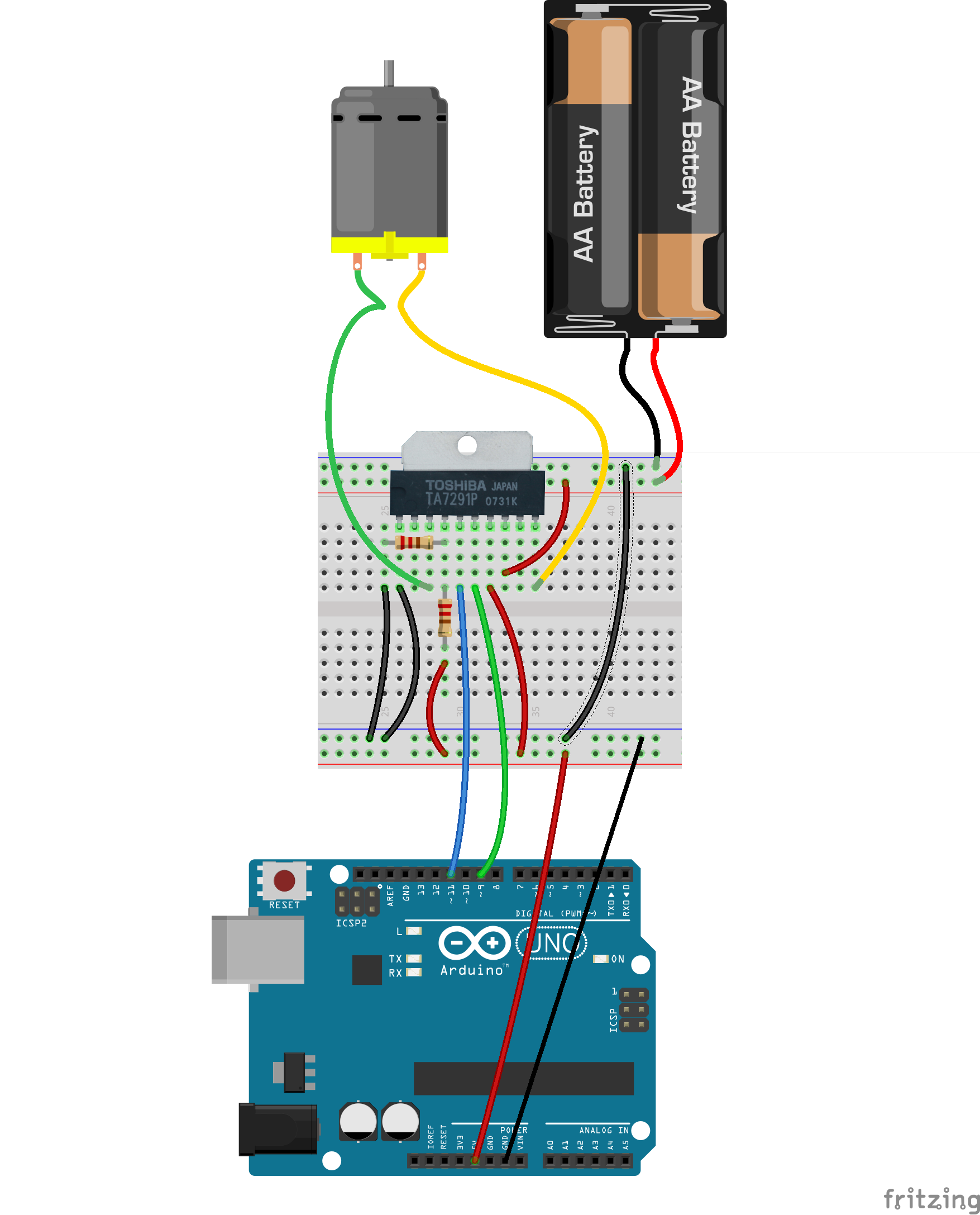
ブレッドボードにモータードライバIC(TA7291P)を挿します。写真の場所に指すことを前提で説明をするので、ブレッドボードの構造を知らない方は写真のとおりに挿してください。
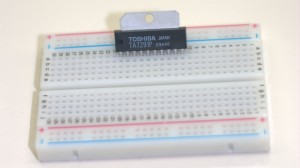
ブレッドボードとTA7291P
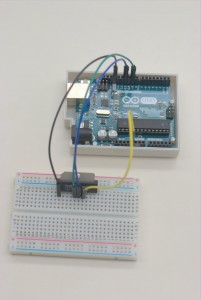
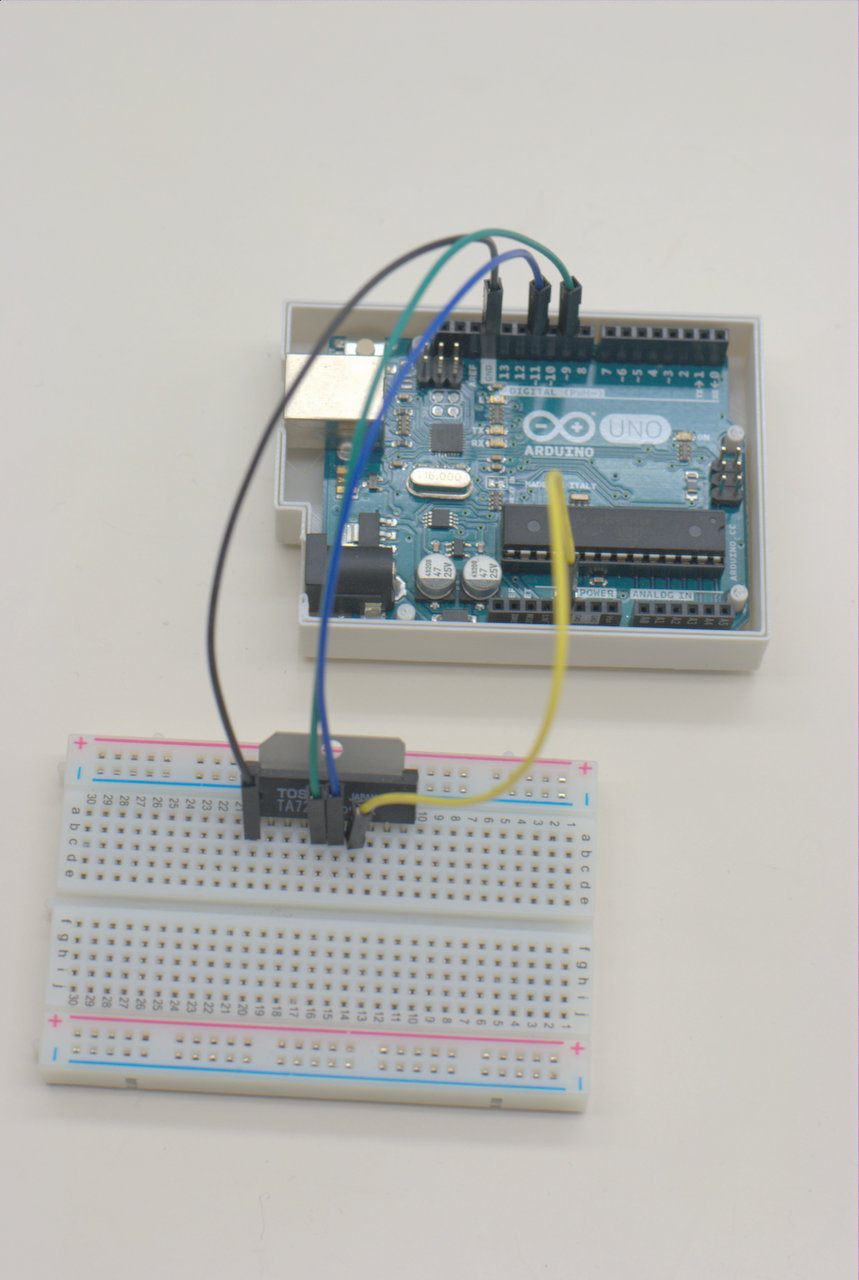
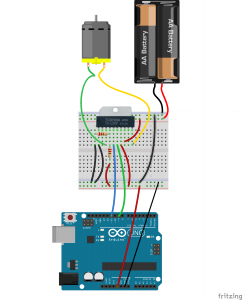
ArduinoとTA7291P
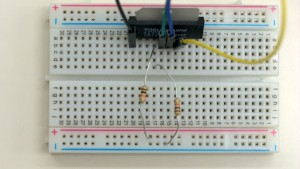
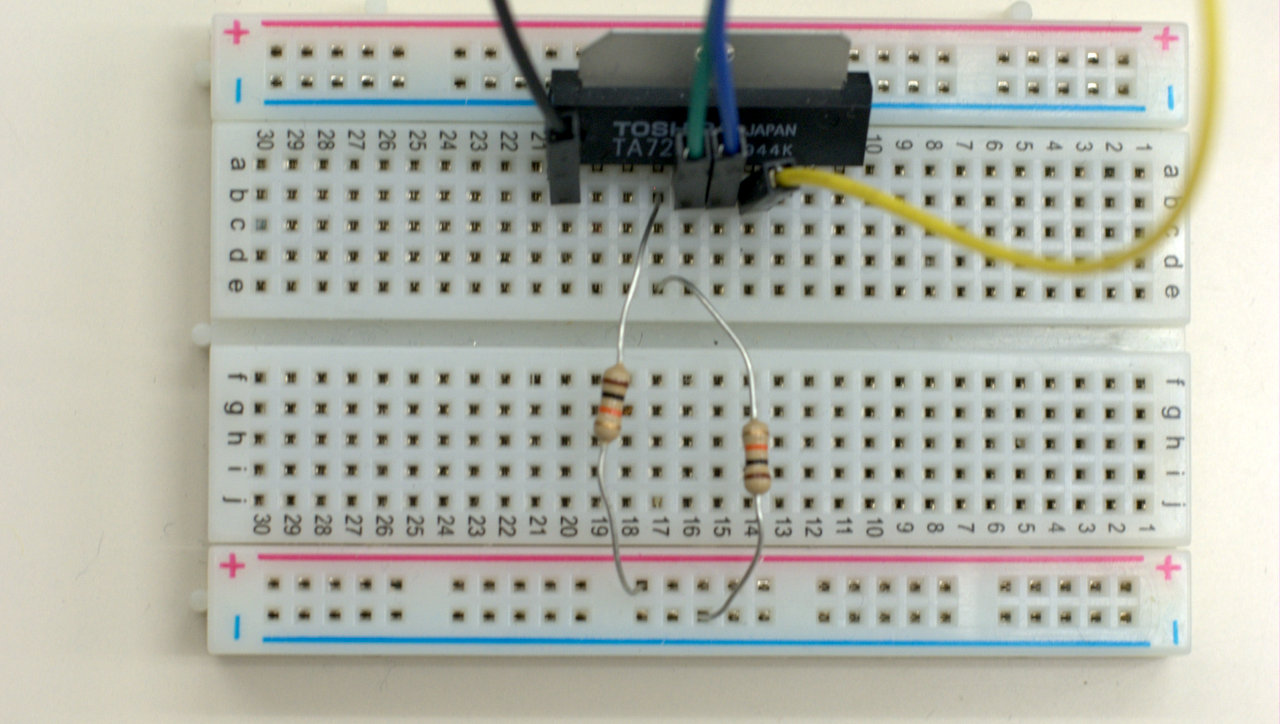
TA7291Pに抵抗をつなぐ
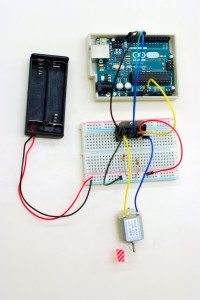
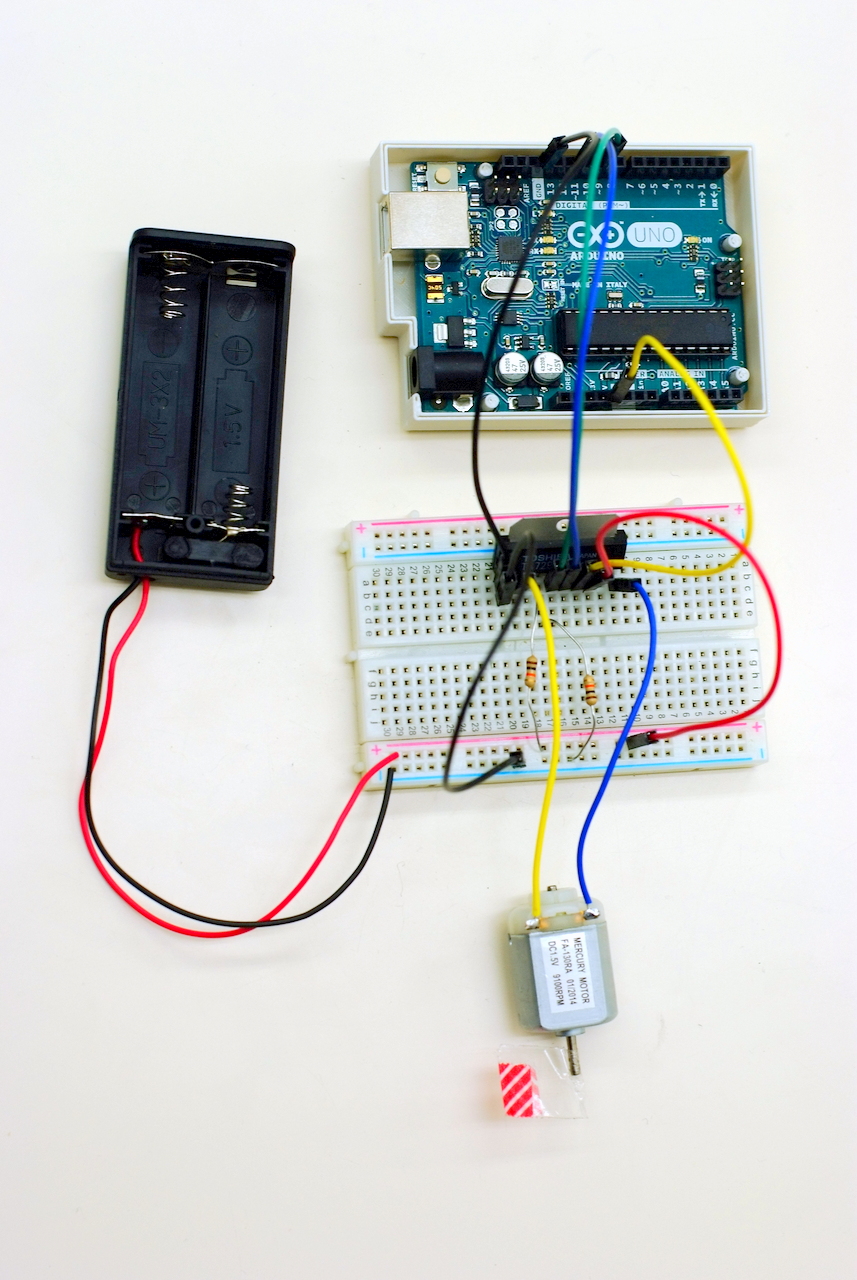
キットに電池ボックスとモーターをつなぐ
//サンプルスケッチ
//モーターの正転逆転を繰り返す
#define PWM0 9
#define PWM1 11
#define LED 13
void setup() {
pinMode(PWM0,OUTPUT);
pinMode(PWM1,OUTPUT);
pinMode(LED,OUTPUT);
}
void loop() {
analogWrite(PWM0, 255);
digitalWrite(LED,HIGH);
delay(5000);
analogWrite(PWM0, 0);
digitalWrite(LED,LOW);
delay(1000);
analogWrite(PWM1, 255);
digitalWrite(LED,HIGH);
delay(5000);
analogWrite(PWM1, 0);
digitalWrite(LED,LOW);
delay(1000);
}
//---ここまで---
メニューの「ツール」→「マイコンボード」 もしくは「ボード」*でArduino Unoを選択します。
メニューの 「ツール」→「シリアルポート」 もしくは「ポート」*で正しいポートを選択します。
「マイコンボードに書き込む」のボタンでArduino Unoにサンプルスケッチをコンパイル・転送します。
成功していた場合、電池ボックスのスイッチをオンにするとモーターが回りだします。5秒に一度止まり、回転が逆になります。
次回以降、回路の説明・サンプルソースの解説・応用方法を紹介します!
追記(2015.5.13)
RT-KIT-DCM
“DCモーター実験キット”はアイル店頭、WEBショップで販売中です。
↓ 画像クリックで商品購入ページヘジャンプします ↓