こんにちはYukiです。日本に帰ってきてからもなんかいろいろフラグがたっててちょっと時間たってきましたが、DRCを振り返ってみましょう。
足を見れば、そのロボットの歩きやボディがわかると言っても過言ではないほど、人型ロボットの足にはその設計思想がにじみ出ます。
ちなみに、ここでとりあげたいのは、足首から先の「足」なのです。ふとももから足首までの「脚」ではないのです。
2足2腕の人型ロボットを作ってあるかせたことがある人には、あるある、とうなづける「足」の部分です。
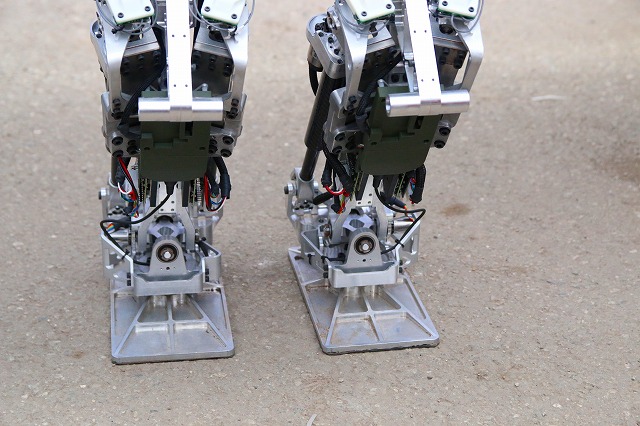
足首からかかとにかけての構造、かかとからつま先までの足のつくり、大きさ、センサーの配置、整ったつま先の形、足裏全体のフォルムや素材、多くの方がそこは汚いでしょう!あまり歩きに関係ないでしょう!と思われている「足」、それが2足歩行ではポイントなのです。
もちろん、すらっとしたデザインのロボットを見ればスタイルの良いロボットだなと思いますし、DRCにはいなかったですが、女性型を見れば眼福だと思います。
だけれども、機能美とでも言うか、歩きを見れば、そのロボットの動きに対する設計者の思想がわかろうと言うもの。
DRCでは人型ロボットがメインな機体でしたので、足フェチをしてみたいとおもいます。
今回のDRCのお題は、レスキューということで、路面やタスクとしては、ダートあり、車の運転あり(=ペダル)、コンクリでの歩行あり、瓦礫の中をいくか、でこぼこのブロックの上を歩くか、階段を上るなどさまざまな素材の上を歩くということになります。それでもトライアルに比べれば、簡単化されてはいると思います。
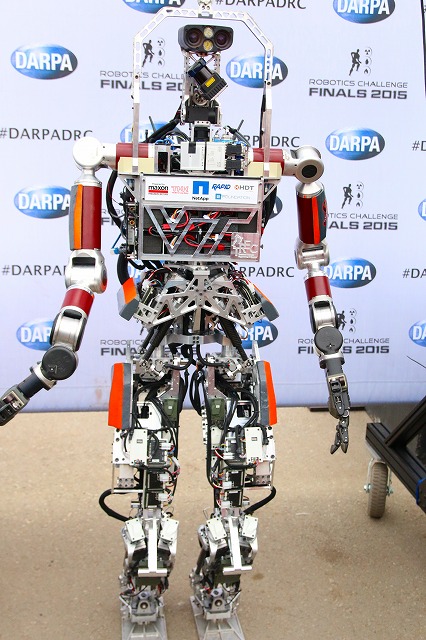
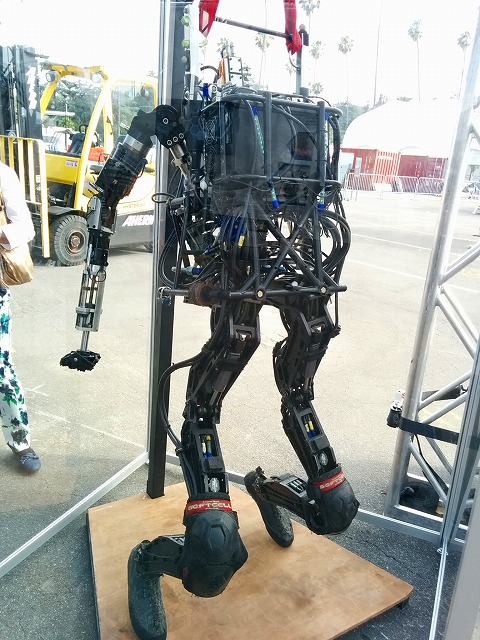
足の写真を見ながら、どんな風な設計思想なのかを思いをはせてください。w
Valor

SRI(DRC出場機体ではなくてEXPO展示)


Walkman


HRP2


ATLAS


Jaxon


Petman
かかと側から見た足

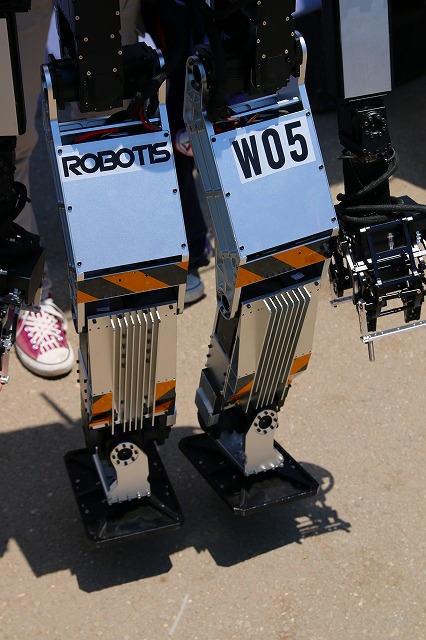
THORMAN(ROBOTIS)

足以外はどうでもいいのか?そんなことはないですよ。
腕フェチな話はまた別の機会に。w