ドーモ Seijiデス。
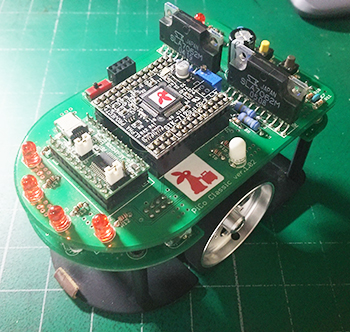
うちの製品でいま一番ホットなやつ、Raspberry Pi Mouse V2です。問い合わせも比例して多くなってますので今回ちょっと紹介させていただきます。

商品の特徴は
比較的カンタンに扱える移動式ロボット
言語に依存しない開発が可能
人工知能の研究・学習に使用可能
ROS/RTMで制御できる(※1,※2)
Shellで動く(※3)
対応LiPoバッテリを標準搭載
マイクロマウス公式大会レギュレーションに対応
オープンソースハードウェア
※1 ROS(Robot Operating System):ロボット制御用ミドルウェア。オープンソースで配布され世界中で多くのロボットの研究に使われており、開発者コミュニティではwikiなどもあります。ROSを使うことにより、ロボットの開発の時間や手間を削減することができます。基本的にオープンソースで開発されています。 また、コアなソフトウェアはBSDライセンスを採用しているものが多いです。
※2 RTM:RTミドルウェア。単体のロボットだけでなく、利用可能な様々ロボット機能要素を指してRT (Robot Technology/Robotic Technology) と呼びます。 RTM(RTミドルウエア)とは、こうした様々な機能要素をモジュール化しソフトウエア的に統合するためのプラットフォームです。
※3 アールティにてデバイスドライバを用意しておりますので、Linuxのシェルによる制御が可能です。
また、OSはLinuxのためC++、JAVAをはじめ、多くの言語に対応しております。
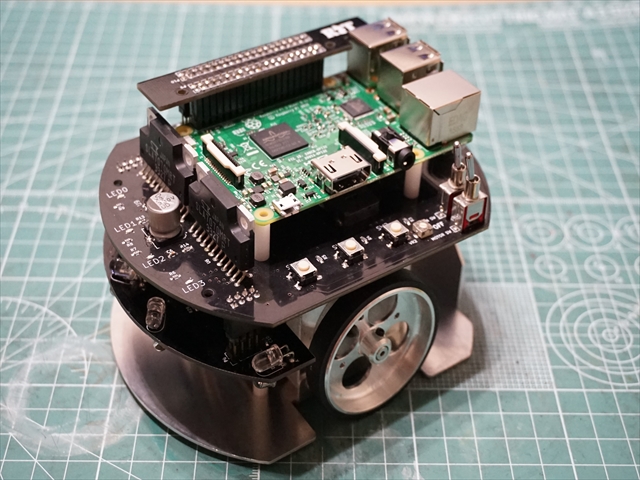
RaspberryPiを車体上面に搭載

言語を選ばずに開発ができるというのが人気の要因です。傾向としてROSで使いたいというお客様が最近は増えてきています。
製品の仕様としては
PC接続方法 :LAN,シリアル通信
搭載可能制御コンピュータ(※3):Raspberry Pi 3 B , Raspberry Pi 2 B ,Raspberry Pi B+
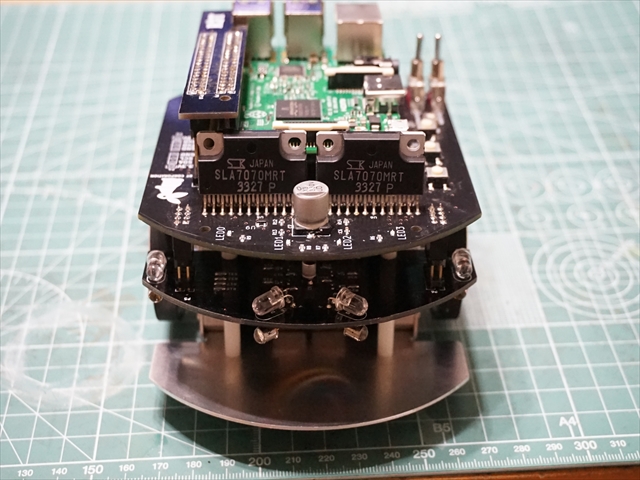
モータ- :4相ステッピングモータ x2(基本ステップ角:0.9度,1回転ステップ数: 400)
入出力ポート :RaspberryPiに準拠
オーディオ :プログラム可能なブザー x1
センサ :赤色LEDを用いた距離センサ x4
ボタン :プッシュボタン x3
LED :プログラム可能なLED x4,電源用ステータスLED x1
バッテリ :リチウムイオンバッテリ 3セル 1000mAh
重量 :740g ( バッテリ含む )
サイズ :縦130 x 横100 x 高さ83 (mm)
赤色LED距離センサーやステッピングモーターを使って名前通りマイクロマウスとしても使えます。
ラズパイマウスで挑戦中ののりさん

千葉工業大学 上田先生の迷路走行
よく質問でくる「Pi3に対応しているか?」ですが、現在発売中のV2からRaspberry Pi 3にも対応済みです。
初代からの変更点としては
Raspberry Pi 3に対応するために電源を強化(3A)
バッテリ保護のため、電圧監視機能を標準搭載(電圧が10Vまで低下するとブザーが鳴ります)
バッテリを保持するためのシャーシ機構を採用
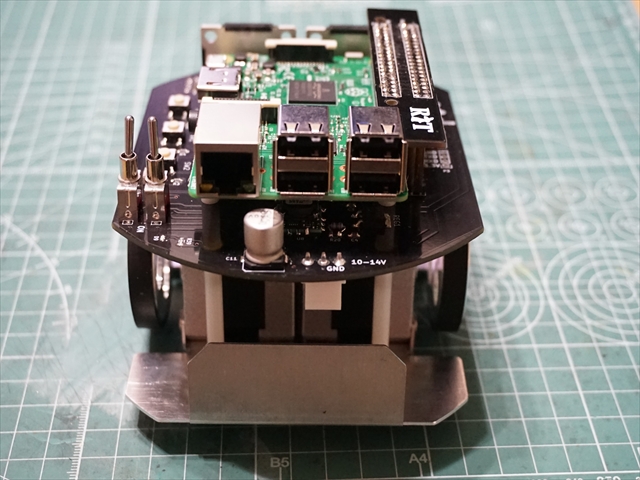
フランジ立てて、バッテリーが搭載しやすくなるよう変更
構成としては
・車体とバッテリーがセットになったもの
・車体、バッテリー、充電器、構築済みmicroSDカードまでセットになったもの
の2種類が発売中です。どうです?気になってきました?
次回は環境構築を解説していきます。
「なんか難しそう」って思って悩んでいる方の背中が押せればいいな。