ドーモ Seijiです
2017年 2月25日~26日に開催される「MISUMI presents 第30回ROBO-ONE」で、興味深い新競技「ROBO-ONE auto」が開催されます、第一回です。
ロボットの規定は通常のROBO-ONEルールですが、最大重量が5kgまでとなっている点が大きな違いです。
あと、操縦が認められていない というところが最大のポイントで自律競技に特化した競技になっています。競技規則にも記載されています。
競技規則5.1-2. ROBO-ONE auto の作動方法
試合中はロボットに搭載されたセンサーやコンピュータによる自律動作でなければならない。ただし、ネットワークにつながり、人間の操作が加わらない情報をやり取りすることは許される。
始めの合図で動作を開始し、止めの合図で動作を停止するように製作され、この時は人間の操作が許される。
(以上、競技規則より抜粋)
読む限りですが、この「ただし、ネットワークにつながり、人間の操作が加わらない情報をやり取りすることは許される」の点で外部PCで処理してロボ本体に返すというリモートブレイン的な使い方が出来そうな出来なさそうな書き方がされています。
自律のために必要な要素として
1:相手機体の検知(位置、距離)
2:リング落下防止
3:自位置の把握
という点が思いつきます。
例えば1の相手機体の検知は前方、側方にセンサーを設置して反応のある方向と特定して進んでいき、射程距離に入ったら攻撃。
2の落下防止は、リングのエッジを検出して近づかないアルゴリズムを用意。
3の自位置の把握は無くてもなんとかなりそうです。ただ、自位置が把握出来ていれば相手位置情報と合わせて戦略も立てられそうです。
KONDOユーザーならKCB-4WLを使えば画像認識も含め、ある程度は実現出来そうです。

気付いた点として、センサーの取り付け位置の規定等の記載はありませんが、拡大解釈するとフィールド外部カメラ等を使ってフィールド状況の認識となどを行ってもいいのか?とも読み取れます。
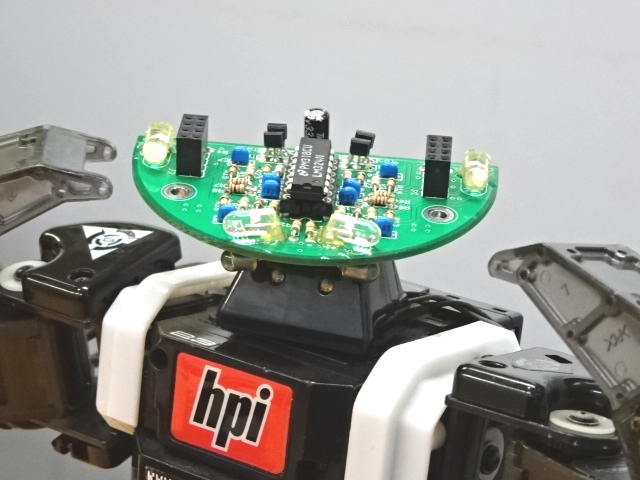
ロボカップの小型ヒューマノイドリーグのグローバルビジョン技術が応用出来そうです。
小型ヒューマノイドリーグの参考動画。天井カメラから頭部のマーカーを認識してフィールド上の状況を認識して、サーバからの司令で自律行動してます。機体側にセンサー類は未搭載です。
順当に考えると5kgルールを使ってロボ本体にセンサーを搭載する単体完結型でしょう。
赤外線測距センサー、超音波センサー、カメラあたりで情報を入れて、モーションデータを再生させる方法が市販コントロールボードで出来ますね。
実はROBOTIS-MINIのセンサー廻りが充実していて、自律機体が作りやすいです。そしておそらく最軽量機体になります。
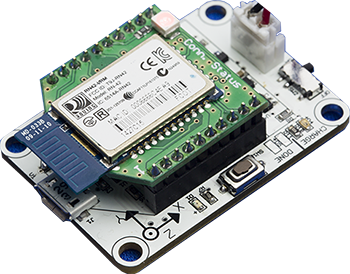
個人的にはPi:Co Classicのセンサーボードを使ってみたいです。
 マイクロマウス用のままではレンジが短いので、別途レンジが長いのが必要になるかもしれないです。
マイクロマウス用のままではレンジが短いので、別途レンジが長いのが必要になるかもしれないです。
ROBO-ONE autoは第一回なので、競技規則をよく読み込んで色々チャレンジするチャンスです。みなさん是非チャレンジしてみてください。
次回はセンサー類のネタを書いていきます。
 超音波センサー 超音波センサー |
 超音波距離センサモジュールMaxbotix LV-EZ1 超音波距離センサモジュールMaxbotix LV-EZ1 |
 PSD素子測距センサ コネクタ付セット GP2Y0A21YK0F PSD素子測距センサ コネクタ付セット GP2Y0A21YK0F |