こんにちは、satoです。Raspberry Pi Catがまもなく販売開始されます。直近ではSI2018の企業展示ブースで展示予定です。
私は主にソフトウェアの開発に携わっているので今回から複数回に分けてソフトウェア面からRaspberry Pi Catを紹介していきます。
今回はRaspberry Pi Catの特徴と、公開しているリポジトリについての情報を簡単にまとめて紹介します。
次回からは今回紹介したリポジトリの詳細を解説していきます。

Raspberry Pi Catとは
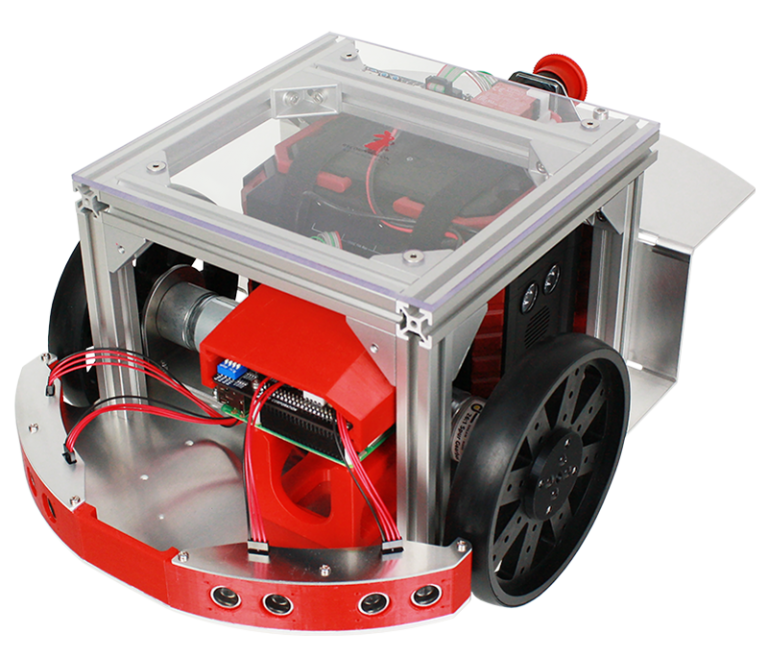
Raspberry Pi Catは、Raspberry Piを搭載した車輪型ロボットです。
Raspberry Pi Mouseをスケールアップしたものとなっており、Raspberry Pi Mouseと同じデバイスドライバで動かすことができます。
上部にPCをおけるスペースがあるので、Raspberry Piの計算能力で足りない場合はRaspberry PiとPCを接続し、処理を分散させることができます。
Raspberry Pi Mouseとの違い
Raspberry Pi CatはRaspberry Pi Mouseと同じ二輪(+補助輪)の車輪型ロボットですが、Raspberry Pi Mouseと比較して走破性能が向上し、屋外走行も可能になりました。
Raspberry Pi Catを使えば、Raspberry Pi Mouseのために書いたプログラムを少し変更するだけで、今まではできなかった屋外走行もさせることができるようになります。
Raspberry Pi Mouseはマイクロマウス規格の車輪型ロボットで、特徴の一つに上田隆一先生 (千葉工業大学) の「Raspberry Piで学ぶ ROSロボット入門」を読みながらROS (Robot Operating System) を勉強できることが挙げられます。
今までだとRaspberry Pi Mouseを使ってROSの勉強をした後、例えば、Raspberry Pi MouseにURGを載せてマッピングをしようと思ってもRaspberry Pi Mouseでは乗り越えられる段差が小さいのでマッピングできるのは室内のごく一部に限られました。実際にマッピングしている様子はこちらです。
どのようにプログラムを書き換えればRaspberry Pi Catを制御できるのか「Raspberry Piで学ぶ ROSロボット入門」のプログラムを例として取り上げ、計算方法にも触れながら解説していく予定です。
関連ページ
Raspberry Pi Catはハードウェア情報、ソフトウェア情報ともに公開しています。次回以降、リポジトリの中身とその使い方について紹介していきますのでご期待ください!
- 商品ページ
- ROS Wiki
- GitHub Repositories
- ハードウェア情報リポジトリ
- Raspberry Pi Catセットアップ用スクリプト
- ROSパッケージ
- Raspberry Pi Cat制御用ROSパッケージ(C++版)
- 「Raspberry Piで学ぶ ROSロボット入門」をベースにしたRaspberry Pi Cat用のROSパッケージ
- Raspberry Pi Catをゲームパッドで操作するためのROSパッケージ
- Raspberry Pi CatでSLAMを用いてマッピングをするためのROSパッケージ

