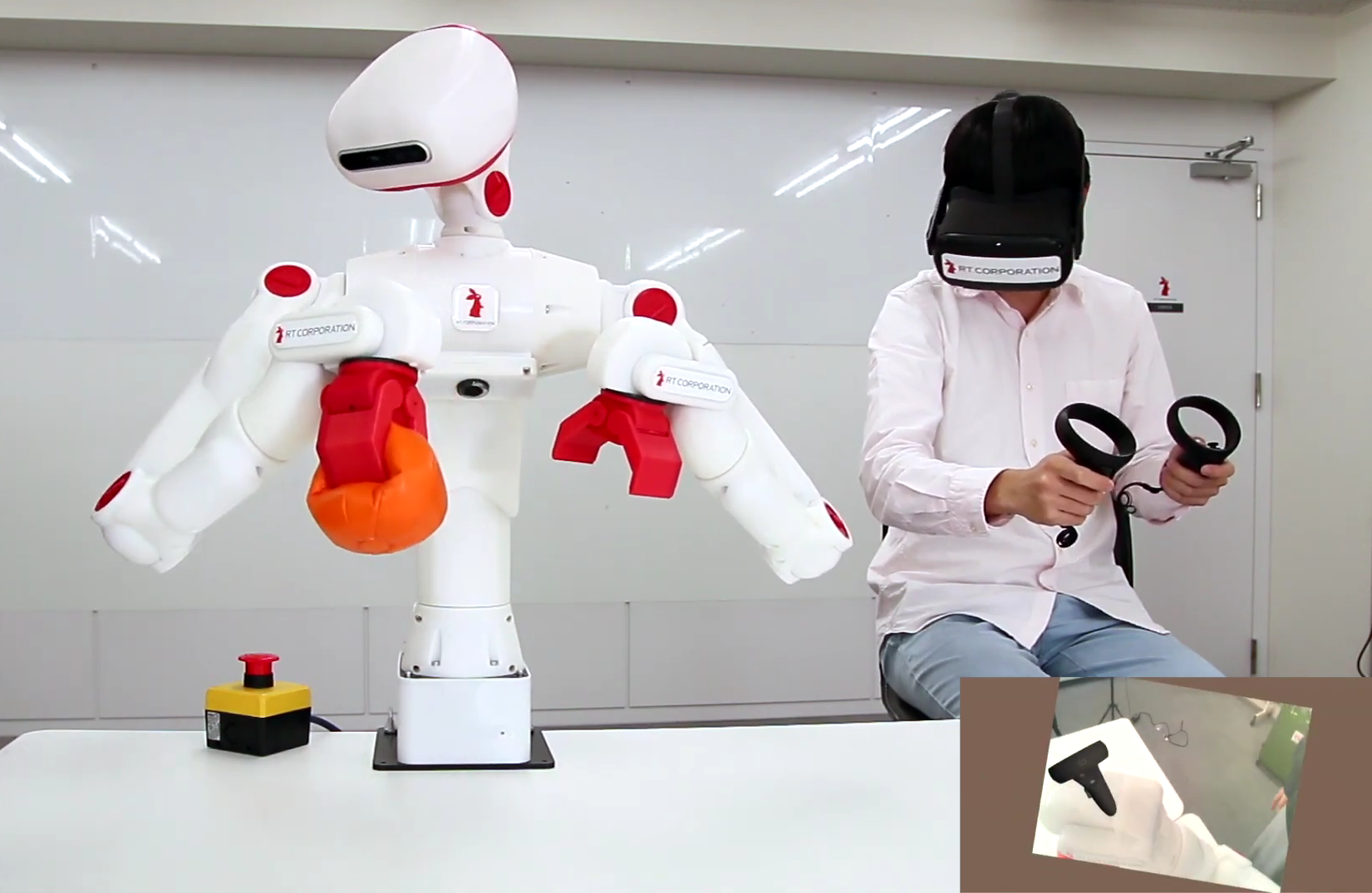
今回は研究用上半身人型ロボットSciurus17を、VR機器を用いて操作する動画をご紹介します。
デモ動画
VR機器を用いたアバターロボットの開発例です。
VR開発にはUnity、ロボットの制御にはROSを使用しているため、UnityとROSを連携したシステム例としてもご覧いただけます。
デモ動画の見どころ
見どころは2点あります。
1点目は、UnityとROSを連携させることで、VR機器のような、やや開発の敷居が高いデバイスでも簡単にロボットを操作することができる点です。
操作者の頭部姿勢や手先位置姿勢をロボットに反映することで、直観的に動かせます。
アールティはユニティ・テクノロジーズ・ジャパン株式会社と共同で、ROS対応ロボットの操作性をUnityでより向上させるためのロボット入門者向け教材を開発し、公開しています。
GitHub「UnityとROSで学ぶ移動ロボット入門 UI作成編」
YouTube「「UnityとROSで学ぶ移動ロボット入門 UI作成編」の紹介 」
2点目は、重力補償によって、人と接触するなどの外力に対して柔軟な動作が可能な点です。
動画では、人がロボットの腕を掴んで動かす外力に対して、柔軟に受け止めていることが分かります。
重力補償サンプルの詳細は下記ブログ記事をご覧ください。
ヒューマノイドロボットブログ「CRANE-X7とSciurus17の重力補償サンプルをC++ライブラリに追加しました」
製品紹介

使用したロボットは、アールティの「Sciurus17(シューラスセブンティーン)」。
頭部に3次元距離カメラ搭載。位置・速度・電流(トルク)制御を選択可能な上半身人型のヒューマノイドロボットです。
詳細は下記製品ページをご覧ください。

Sciurus17に関するご質問等ございましたら、お気軽に下記ページよりお問い合わせください。

Sciurus17の製品活用事例
その他、Sciurus17を使った製品活用事例をご紹介します。
アバターロボットとしてご活用いただいた例(H2L株式会社様)

企業の自動化導入支援へ繋げるデモをROSで開発をされている例(大阪産業技術研究所様)