こんにちは。アールティ営業部の渋谷です。
アールティの研究開発向けロボットをご利用いただいているお客様に、実際の使用感やロボットを使った研究開発の内容を伺うインタビュー企画の第四弾、後編です。

Raspberry Pi Cat V2の正式発売に先駆けて、芝浦工業大学 工学部 情報工学科 教授 新熊先生の研究室(社会情報ネットワークデザイン研究室)ではβ版をご活用いただいています。
2022年11月には新熊先生が設立した大学発ベンチャーである株式会社ハイパーデジタルツインと共同で、Raspberry Pi Cat V2を使った「自律走行型ロボットによるテイクアウトフード運搬の実証実験」を実施しています。
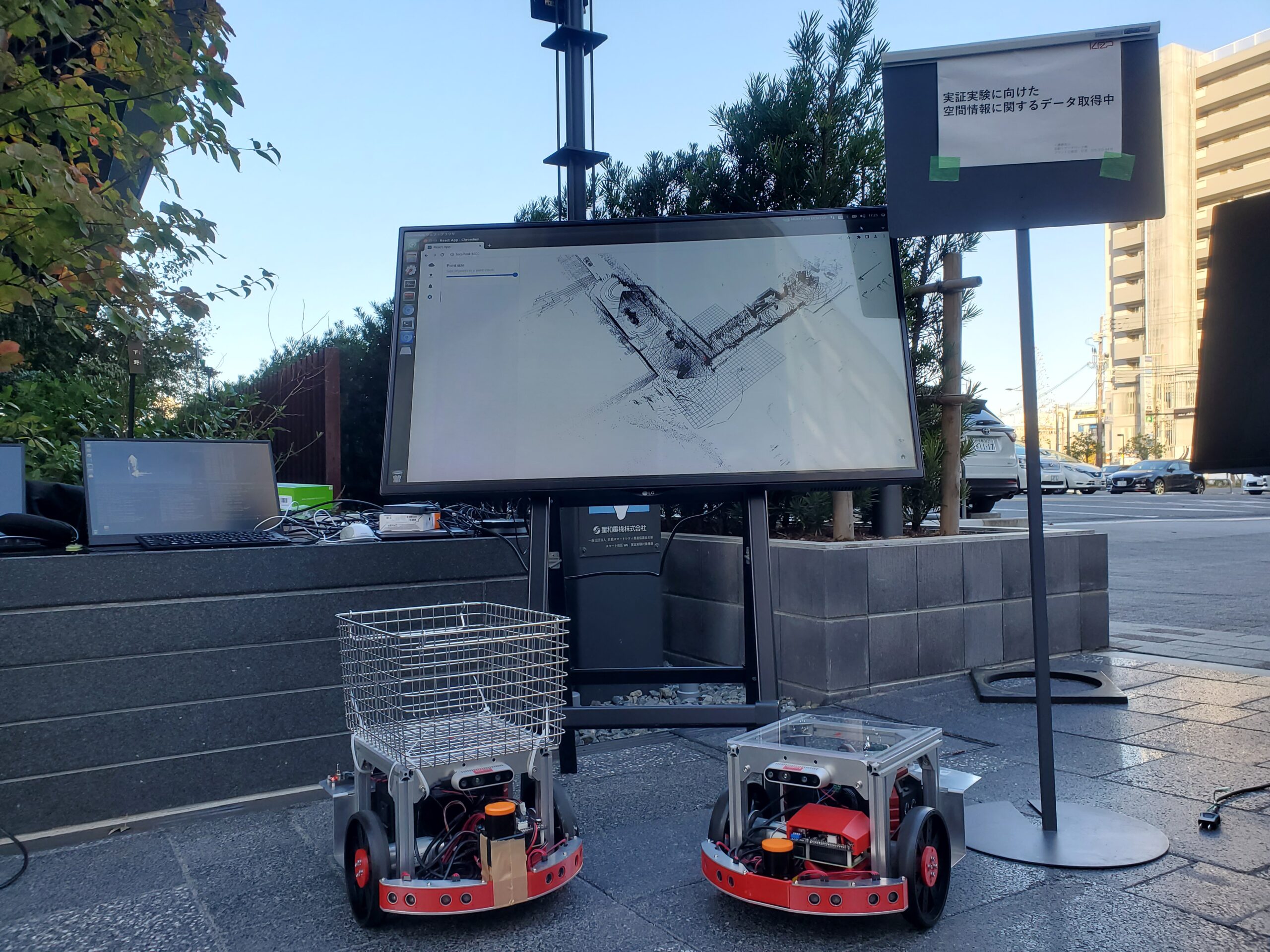
京都リサーチパークのフードトラックが集積するエリアに計10台のセンサを設置し、取得した空間特徴情報で作成したマップを使いながら、Raspberry Pi Cat V2がテイクアウトフードを上に載せて約60~80メートル先で待つお客様に運搬しました。
(参考:芝浦工業大学プレスリリース)

Raspberry Pi Cat V2を使用したテイクアウトフードを運ぶ実証実験(京都リサーチパーク株式会社提供)

(京都リサーチパーク株式会社提供)
後編ではベンチャー企業としての取り組みや実証実験へのRaspberry Pi Cat V2活用について伺っていきます。
ベンチャー企業としての活動
新熊先生:基本的にはそうですね。
そして「繋ぐ」というところで企業さんのお手伝いをしています。
「繋ぐ」というのは単にネットワークを繋ぐということではなく、データの関係性やブロックチェーン技術など、情報の信頼性とか一意性、情報の見えない関係を繋ぐとか、そういうところをサポートしています。
そうです。研究室と会社が密に連携しています。
研究室では研究とプロトタイピングがメインで、学生の学びと経験、社会に向けての実績が一体になっています。
さらに会社があると、社会実装に繋げることができます。
大学のポジションを持っているメンバーが研究室と会社の橋渡しをして、研究から事業化に向けて動いています。
会社は研究と事業化の両輪で進んでいて、研究をしていったらどんどんプロダクトが作れているといった状態かなと思います。
Jetson Nano Mouseとの使い分け

新熊先生:Jetson Nano Mouseは、まず、私や学生が自分たちで移動ロボットを動かす、基本を学ぶという点で活用しています。
私も芝浦工大に移る前まではロボットは全くやっていなかったんです。
SUMO (Simulation of Urban MObility)を用いたモビリティのシミュレーションをやっていましたが、実際にモノを動かしていなかったので。御社が教育用として出されている教育プログラムを活用しながら色々試しています。
ただJetson Nano Mouseはモノを運べないので、そこで約6kgのペイロードがあるRaspberry Pi Cat V2をご紹介いただいて購入しました。
研究室内をグルっと移動させたり、屋外走行にも対応しているので屋外でモノを載せて運ぶ実証実験にも活用していますね。
既に使っているJetson Nano Mouseのソフトウェアが活用できるというのもありますが、Raspberry Pi Cat V2は結構見た目の点でも良いと思っています。
Jetson Nano Mouseの黒も好きですが、Raspberry Pi Cat V2の赤い色だったり丸みあるボディだったり、プロトタイプとしての見た目がかっこいいですね。
研究室に置くにも実験で使うにも良い見た目だと思います。
今回の実験はテイクアウトフードでしたし、社会実験・テスト・試作の範囲では可搬重量も問題なかったです。
Raspberry Pi Cat使用レビュー
和合さん:最初に使っていたJetson Nano Mouseはかなり小柄で手軽に実験ができることが利点だと思うのですが、ロボットを少しずつ動かしていくと「もっと大きい、モノを運べるようなロボットを動かしてみたいな」と感じます。
Raspberry Pi Cat V2はそれを叶えつつ、ROSのパッケージが簡単に入れられて、自律走行ができるようなロボットだったので、良い製品だなと思いました。
和合さん:そうですね。
Jetson Nano Mouseでできることは、ほぼ同じ手順を踏めばRaspberry Pi Cat V2でもできるので、まず自宅などでJetson Nano Mouseで練習をして、屋外や研究室でRaspberry Pi Cat V2のセットアップをするなどして使い分けました。
2つの製品間で違う操作が少なかったので、その点は非常に使いやすかったです。入門としてやっていたものを大きなロボットでも使えるという点で、かなりメリットに感じました。
和合さん:屋内で使う時は地面が平坦なので綺麗にセンシングが可能です。
しかし屋外で環境マップの作成時に、地面の傾斜でLiDARのレーダーが地面にぶつかってしまい、障害物があるように認識したので、誤認識を減らそうとセンサの高さを変えました。
和合さん:Raspberry Pi Catは、ROSを初めて使う人や、これからROSを使ってロボットを使いたい人にはぜひお勧めしたいと思っています。
また、ある程度大きなロボットでモノを運ぼうと思っている人や、中級者・上級者で色々な実験や研究に使うメリットがあると思います。
研究の魅力と原動力
新熊先生:情報ネットワークや食・住・移動を繋ぐ「社会」や「デザイン」の研究を通じて現実の世界の仕組みや原理・メカニズムに近づけるところと、それを学びに繋げられるところですね。
スマートシティの中で活用が進んでいるデジタルツインという技術は、デジタル空間に現実世界のコピーを作ってまずは把握し、理解し、モデルを作るんですが、「Aが起きたらBが起きる」という現実世界を、デジタル空間上で再現できるかというと、そうではないんです。
分かりやすいのは、路面が凍結していたら車がスリップする例です。
「どれ位スリップするか」「タイヤを変えたらどう変わるか」「運転に気を付けたらどう変わるか」をデジタル化するのは難しいんです。路面の状態にもよるし、タイヤの状態にもよるので。
そういう物理的な面もありますし、人の心も「こういう言葉を伝えたらどう伝わるのか」「どうリアクションが返ってくるのか」など、デジタルの世界で全部分かるかというと、分からないですよね。
それが現実の世界でどのような関係性を持っているかが分かってくると、世界の仕組みや原理・メカニズムに近づけるので、そこに魅力を感じます。
私自身が興味があるというのももちろんあるんですけど、基本は本職(先生)として若い人達に学びを与える立場で、そうありたいと思っているので、分からないものを分かったかのように教えるっていうのは無責任ですよね。
私も皆さんも子供の頃や若い頃にそういう経験があると思うんですけど、「これはこういうものなんだから考えても無駄でしょ」みたいな感じで教えられたことがあると思います。でもそれは教えでもないし学びにもならないので。
もちろんまだ解明されていない、分からないことだってありますが、やっぱりそこの本質に近づこうとしている姿勢がすごく大事だと思っています。
すごく抽象的な説明ではあるんですが、私の取り組む研究を通じて学生さんに学びや学びの大切さを伝えられるかなと思っています。
最後に
自動車関連企業の自動運転のニュースはよく目にしていましたが、情報ネットワークという、実際の街での実用に向けた社会的な側面で研究される先生のお話は大変興味深いものでした。
新熊先生の研究室では、京都リサーチパークにおけるテイクアウトフードの実証実験の他に、羽田イノベーションシティでもRaspberry Pi Cat V2を使った実験を行っています。
実用化される日に向けて実験です!!#羽田イノベーションシティ #RaspberryPiCat #mobility pic.twitter.com/t9p65jZyIG
— Shinkuma_Lab (@ShinkumaL) August 15, 2022
様々な場所で新たな分野の研究や実験にアールティ製品が使われていることを嬉しく思います。
新熊先生、和合さん、この度はインタビューにご協力いただきありがとうございました!
インタビューブログをご覧いただいた皆さま、これからも新熊先生と社会情報ネットワークデザイン研究室、株式会社ハイパーデジタルツインを始めとしたベンチャー企業の活動にご注目ください!
新熊亮一先生プロフィール
芝浦工業大学 工学部 情報工学科 教授
研究分野:3Dセンシング、ネットワークAI、IoTブロックチェーン、脳情報モデル
プロフィール・研究内容詳細
社会情報ネットワークデザイン研究室 HP
Twitter:@ShinkumaL
取材協力
今回ご紹介したアールティ製品
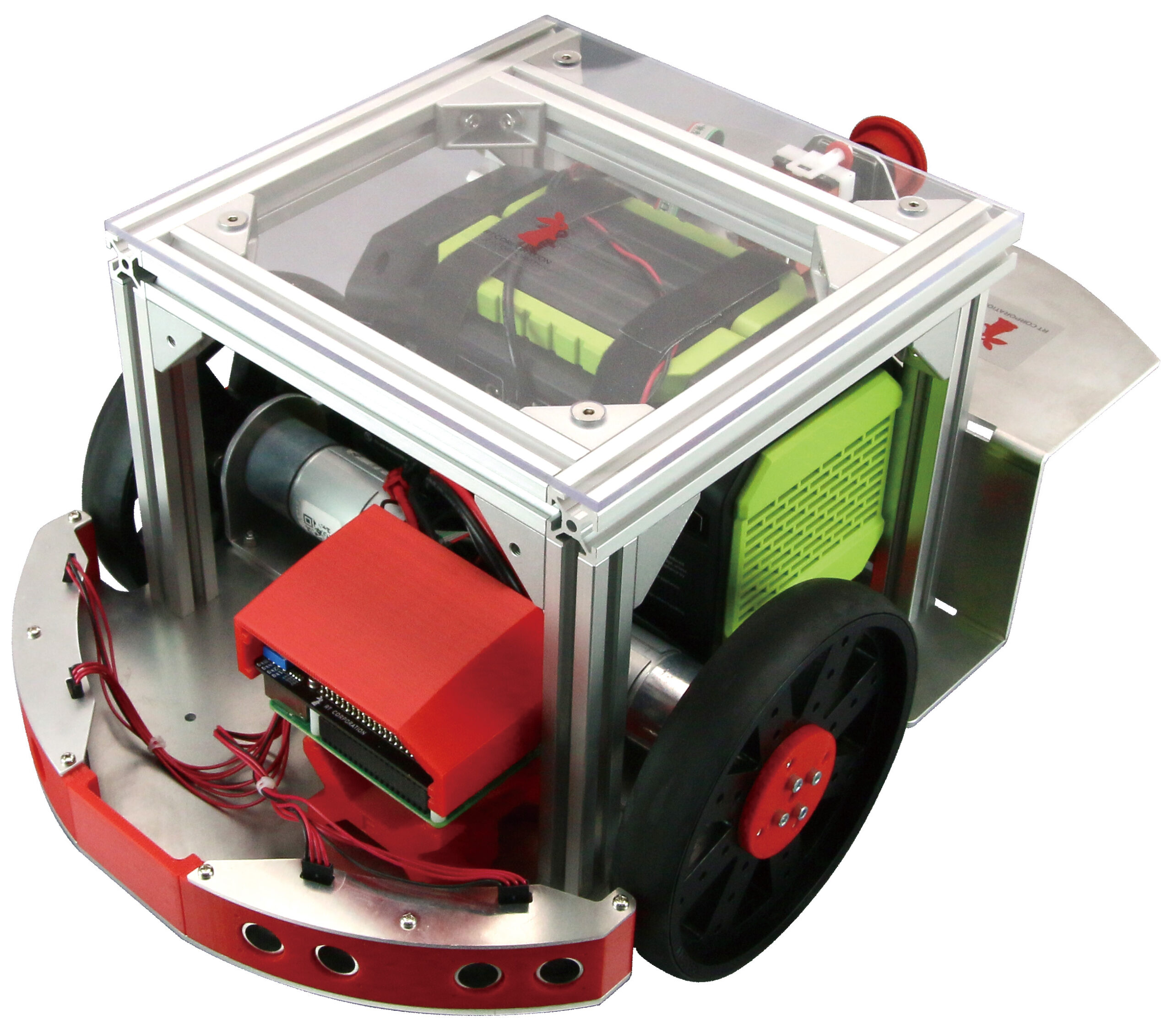
Raspberry Pi Cat V2
※2023年夏頃発売予定。現在はβ版をご案内しています。
詳しくはHPよりお問い合わせください。
参考:Raspberry Pi Cat(V1)製品ページ
第一弾~第三弾のインタビュー記事
Sciurus17事例 H2L株式会社様
Sciurus17事例 大阪産業技術研究所様
CRANE-X7事例 筑波大学モーションコントロール研究室

