こんにちは。アールティ営業部の渋谷です。
アールティ製品を実際にご活用いただいているお客様へのインタビュー企画です。
今回は、立命館大学 総合科学技術研究機構 准教授の萩原良信先生と、立命館大学大学院 情報理工学研究科に所属する長谷川さんにお話を伺いました。
萩原先生は記号創発ロボティクスや、知能情報学、知能ロボティクスなどを専門分野として研究されています。
研究の一部にアールティのSciurus17とCRANE-X7をご活用いただいており、今回はSciurus17について詳細をお伺いしました。
前編と後編に分けてお届けします!
萩原先生とSciurus17、CRANE-X7
研究内容について
萩原先生:よろしくお願いします。
萩原先生:ロボットが教師なし学習(※1)で言語や概念を獲得する研究に使用しています。
人からロボットに対して言語情報を与えて、ロボットが人から与えられた言葉の意味を、身体経験と融合させながら学習する、ということをSciurus17で行っています。
※1:教師なし学習(Unsupervised Learning)とは
機械学習の学習手法のひとつ。学習データに正解を与えない状態で学習させる手法。
教師なし学習では正解のデータがなく、ロボットの中でどのように学習が進んでいくのか予想ができません。そこで、MRデバイスを用いてロボットの知識をビジュアライズすることで学習の状況を把握できるようにしています。
例えば「ロボットはこう勘違いしたんだ」と分かれば「では、こう言葉をかけてあげれば覚えてくれるかな」などの対応ができます。
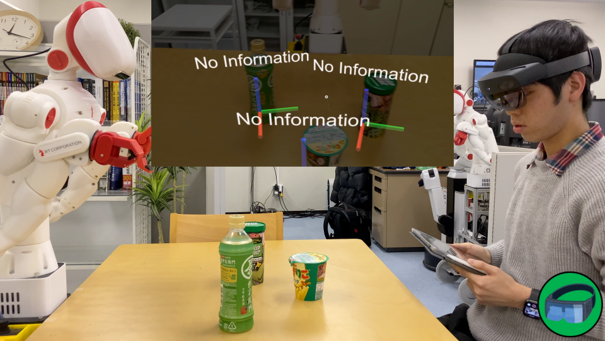
ロボットのカメラと人のMRデバイスを通じ、お互いに見ている物体を照合して日用品を教える
萩原先生:文部科学省助成事業の新学術領域研究に、共創言語進化学という言語進化のメカニズムの解明とコミュニケーションの未来やあり方を提言する研究課題があるのですが、その研究のためにSciurus17を2台購入させていただきました。
私が所属している創発システム研究室(※2)で取り組んでいる、記号創発ロボティクスというアプローチに基づいて上記の研究課題に関する実験をする目的でした。
記号創発ロボティクスは、身体が環境と相互作用することで概念や言語を獲得していく過程を、機械学習やロボティクスの技術を用いて実現することを一つの目的としています(※3)。
参考動画:東大TV「記号創発ロボティクスにおける確率的生成モデルと深層学習の融合」(谷口 忠大)
参考書籍:『記号創発ロボティクス 知能のメカニズム入門』(谷口 忠大)講談社選書メチエ
最終的には、2体のロボットがカテゴリ形成と単語の発話を交互に繰り返すことで、状況に関連付けられた単語が共有される実験を行うのが目標です。
まずは、人から提案された言語情報を用いて、カテゴリ形成と語彙獲得を行う実験から始めました。
人がロボットに「これは〇〇と言うんだよ」と教えたり、親が子供に教えるように物を実際に触らせたり見せたりして、ロボットが自身の身体経験からカテゴリを形成して、単語の意味を学習するという流れを確率的生成モデル(※4)により実現しようとしています。
具体的には、画像、触覚、音、言語などの身体経験(マルチモーダル情報)を観測し、これらの観測が裏に潜むカテゴリ変数から生成されていると仮定したモデルを構築します。そして、得られた観測からベイズ推論によりカテゴリ変数を推定し、このカテゴリ変数を介して、例えばぬいぐるみの画像から「エマちゃん」という名前を予測する事を可能とします。
こうした構成論的アプローチに基づく研究は、認知・発達ロボティクスなどの分野で行われてきました。
確率的生成モデルとは、現実世界のデータに関して、そのデータを生成するしくみ(モデル)がバックにいると考え、更にそのデータが決定論的に厳密に生成されるのではなく、あるバラつきや揺らぎを持って生成されると考えるもの。
(引用元:ブログ「Deus Ex Machina」)
記号創発ロボティクスは、認知・発達ロボティクスに密接に関連する分野であり、特にマルチエージェントの記号創発システムに着目したアプローチです。
個体の学習を基盤としつつ、言語などの記号システムが個体間の記号的なコミュニケーションを通じて創発し、それが個体間のコミュニケーションを実現し制約するミクロ・マクロ・ループ(※5)を研究の対象とします。
このアプローチに基づいて、人間・ロボット間の相互作用を通した、記号的コミュニケーションの創発・発展のプロセスを研究しています。
マクロレベルの社会構造がミクロレベルにおける社会成員の行動から自生的に現れ、またマクロ構造がミクロレベルの振る舞いに影響を与えるという概念
(参考:佐藤 尚,橋本 敬「内部ダイナミクスを持つエージェントとミクロマクロ・ループによる動的社会シミュレーション」『情報処理学会シンポジウム論文集』2004(12),p.263-270)
萩原先生:言語の研究では、例えば今話題のChatGPTなどは大規模な言語データセットを用いた学習によって実現されています。
記号創発“ロボティクス”と入っているのは、私たちの研究は「身体なくして知能なし」という思想に基づいているからです。
脳は全身の神経とつながっています。人間の知能は身体と密接に結びついているのです。
身体に結びついた知能を研究するためにロボットを用いています。
Sciurus17の活用方法
萩原先生:私達が今開発しているのは、ロボットが自身の身体経験(マルチモーダル情報)から言語や概念を獲得する生成モデルです。空間(場所)や物体の概念を主なターゲットにしています。
生活支援のロボットにも取り組んでいるのですが、人と共存するロボットなので、同じ環境にいて何か役に立つ仕事をさせたいと考えています。

コップを人に渡すSciurus17
このような言語指示を達成するには、「カエルのスポンジを取ってきてよ」と人から言われた時にロボットが動けるように研究しています。
「カエルのスポンジを取ってきてよ」と言われて動くために大事なのは、「カエルのスポンジ」がどの場所にありそうかという知識、例えばお風呂場ならその場所がロボットが持つ地図上でどの領域なのかという知識が重要になります。
こういった知識は事前にインプットできれば良いのですが、実際は環境によって異なります。
例えば「カエルのスポンジ」は「おもちゃ」か「清掃道具」のどちらのカテゴリに属するでしょうか?一般的には、清掃道具なのでお風呂場やキッチンにあると予想します。しかし、子供のお気に入りのおもちゃで、子供部屋にあるかもしれません。
しかも、家庭によって地図上における子供部屋の領域は異なります。
つまり、ロボットが取るべき行動は、その家庭の常識に強く依存します。
このため、ロボットは現場で得た観測やユーザとのコミュニケーションからこのような知識を獲得する必要があります。
ロボットが人と話す中で「カエルのスポンジは清掃道具だと思っていたけど、このユーザにとってはおもちゃだった」などと学習するための基本的な設定として、テーブルの上にある様々な物体について人が発話して教えるシーンが考えられます。
このとき、ロボットの知識(推論されたカテゴリや単語の分布)をMRデバイスを用いて可視化する事で、人による言語的な教示をサポートする事ができます。
このように、人との言語的なコミュニケーションを通じて言葉の意味を学習し、環境に適応する生活支援ロボットの計算論モデルの研究を行っています。
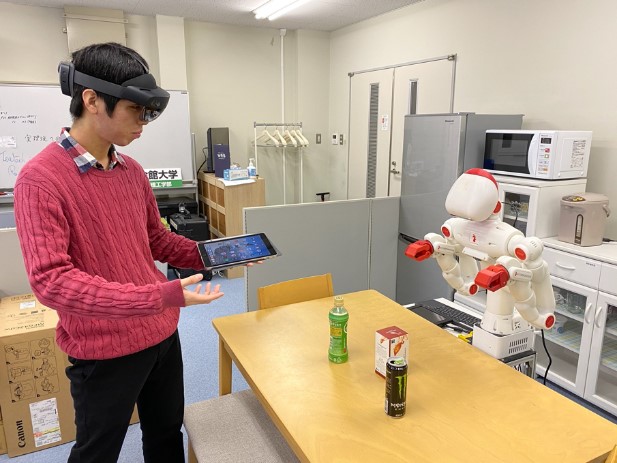
テーブルに置いている物体を人がSciurus17に教える
萩原先生:ロボットに対して人が教えるというときに、Sciurus17はあまり怖くないんです。
私達の研究室には、他社のもっと大きなロボットもあります。重量が100kgくらいあり、モーターのトルクも大きいので、アームを動かすと周りにいた学生たちが一目散に逃げていきます。
Sciurus17は3Dプリンタで作られていて、モーターが小さいけどその分軽い。人が教えたり近い距離で言葉をかけて場を共有するときは安心感があります。
双腕で人型に近いので、コミュニケーションをとりながら教えるシーンで使いやすいです。
Sciurus17は、人の隣で作業する事を想定してデザインされているので、今後も人と共存する用途で使っていきたいと思っています。
後編へ続く
後編では、萩原先生と学生さんからのSciurus17の使用レビューや、先生が研究の先に見据える未来についてご紹介します!



本日はよろしくお願いします。