
アールティはロボティクス・メカトロニクス 講演会 2023 in Nagoyaに併設される企業展示に出展します。協働ロボット、アームロボットから車輪型ロボットまで幅広く展示予定ですので、ご来場予定の方はぜひアールティブースにお立ち寄りください。
開催概要とアールティブース
■開催期間
2023年6月28日(水)~7月1日(土)※企業展示は6月29日、30日のみ
■会場:名古屋国際展示場
アールティブース:イベントホール ブース番号:26
■公式ホームページ
ROBOMECH 2023 in Nagoya
展示内容
Preferred Robotics社製「カチャカ」
(株)Preferred Roboticsが開発する家庭用自律移動ロボット「カチャカ」をアールティから発売予定です!詳細の発表に先立ち、アールティブースで展示します。
公費・校費払いでのお見積りにも対応予定ですので、詳細は会場にてお問合せください。

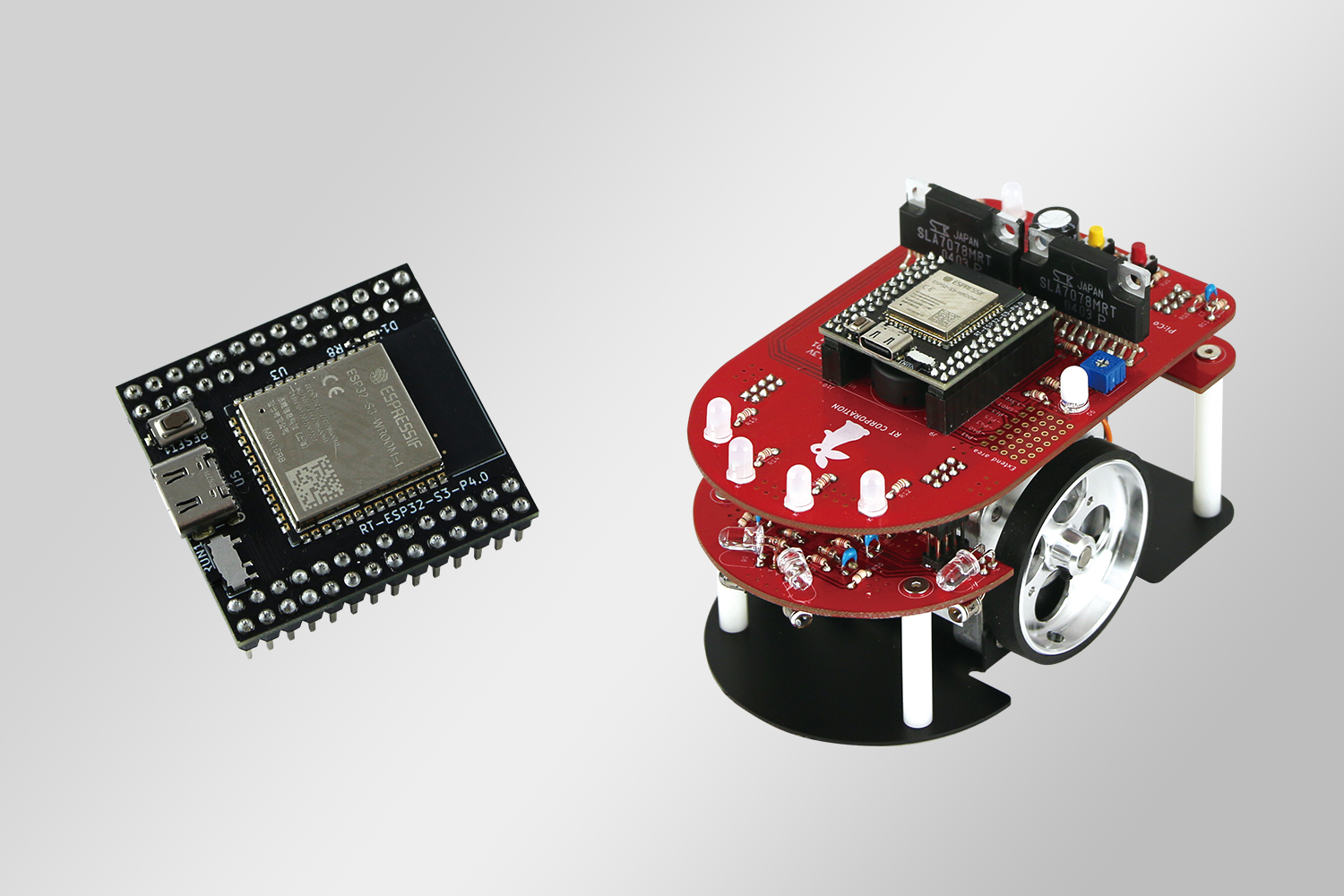
新製品 Pi:Co Classic3オプションキット No.1 [ESP32-S3マイコンボード]
アールティの車輪型ロボット「Pi:Co Classic3」をmicro-ROS対応にできるCPUボード「ESP32-S3マイコンボード」(写真左)を2023年6月26日に発売しました。
micro-ROSのサポートハードウェアであるESP32-S3を搭載することで、Pi:Co Classic3の開発の幅を広げ、micro-ROSを使った開発ができるようになります!詳細はブログをご覧ください。
人型協働ロボット Foodly
Foodlyは小柄な成人サイズの双腕人型ロボットです。
ディープラーニングを活用した AI Vision Systemにより、ばら積みされた食材をひとつひとつ認識してピッキングし、弁当箱・トレイへ盛り付けするまでの作業を1台で完結させます。

その他製品
CRANE-X7
研究用マニピュレータ型7軸ロボット

- ROS/ROS 2対応
- ハードウェア情報公開、3Dプリンタ製でカスタマイズ・修理も手軽に可能
- サーボモータを直接制御するC++のライブラリも公開中
- DYNAMIXELサーボモータを採用しており、位置・速度・電流(トルク)制御が可能
CRANE +V2
研究用マニピュレータ型4軸ロボット

- ROS/ROS 2対応
- 4自由度(4軸+グリッパ)構成で、逆運動学を手計算で解くことが可能
- サーボモータの読み出し機能を使ったダイレクトティーチングも可能
- PCからシリアルポートを扱うことでC言語他様々な言語でプログラミングが可能
Jetson Nano Mouse
Jetson Nano搭載 移動型プラットフォームロボット

- ステレオカメラ搭載
- ROS対応
- 組立済ですぐにロボットを動かすことができる
- NVIDIA社のJetson Nanoを採用。高性能GPUの処理能力を活かしたAI機能の開発が可能
- AGV、自動運転に関するPoCの開発に利用可能
- Raspberry Pi Mouseとソフトウェア互換性あり
Raspberry Pi Mouse
Raspberry Pi搭載 移動型プラットフォームロボット
- ROS/ROS 2対応
- 組立済ですぐにロボットを動かすことができる
- サンプルプログラムやE-Learning教材あり。ロボット教材として自学習が可能
- オプションパーツを追加してAGV,AMRのPoCとして利用可能
- Jetson Nano Mouseとソフトウェア互換性あり
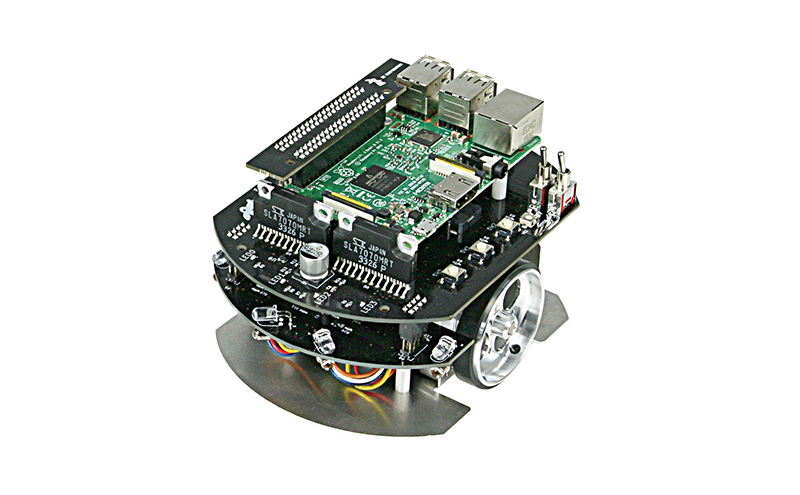
Pi:Co Classic3
組み込み制御学習用のマイクロマウス競技ロボット

- 組立式で電子工作から実践でき、マニュアルからハードウェアの基礎知識を学習できる
- ソフトウェア未経験でも取り掛かりやすいよう、サンプルプログラムを提供
- マイクロマウス競技のクラシック規格に準拠。大会出場が可能
トレーニングトレーサー
組み込み制御学習用のライントレースロボット

- 組立式で電子工作から実践でき、マニュアルからハードウェアの基礎知識を学習できる
- ソフトウェア未経験でも取り掛かりやすいArduino IDE対応サンプルプログラムを提供
- ロボトレース競技の規格準拠で大会出場が可能
ROBOMECH 2023会場へお越しの際は、ぜひお立ち寄りください。お待ちしております!

