晴れてます 晴れてますよ。
蒸し暑くても晴れてるとやっぱ気分いいもんですね(まだ梅雨明けしてないんだっけ?)。
この調子で7月7日に開催される第8回U1Kも晴れてほしいとこです。
現在参加者募集中です。 新競技「腕を使った何らかの知的競技(仮)」もぜひチャレンジしてください。
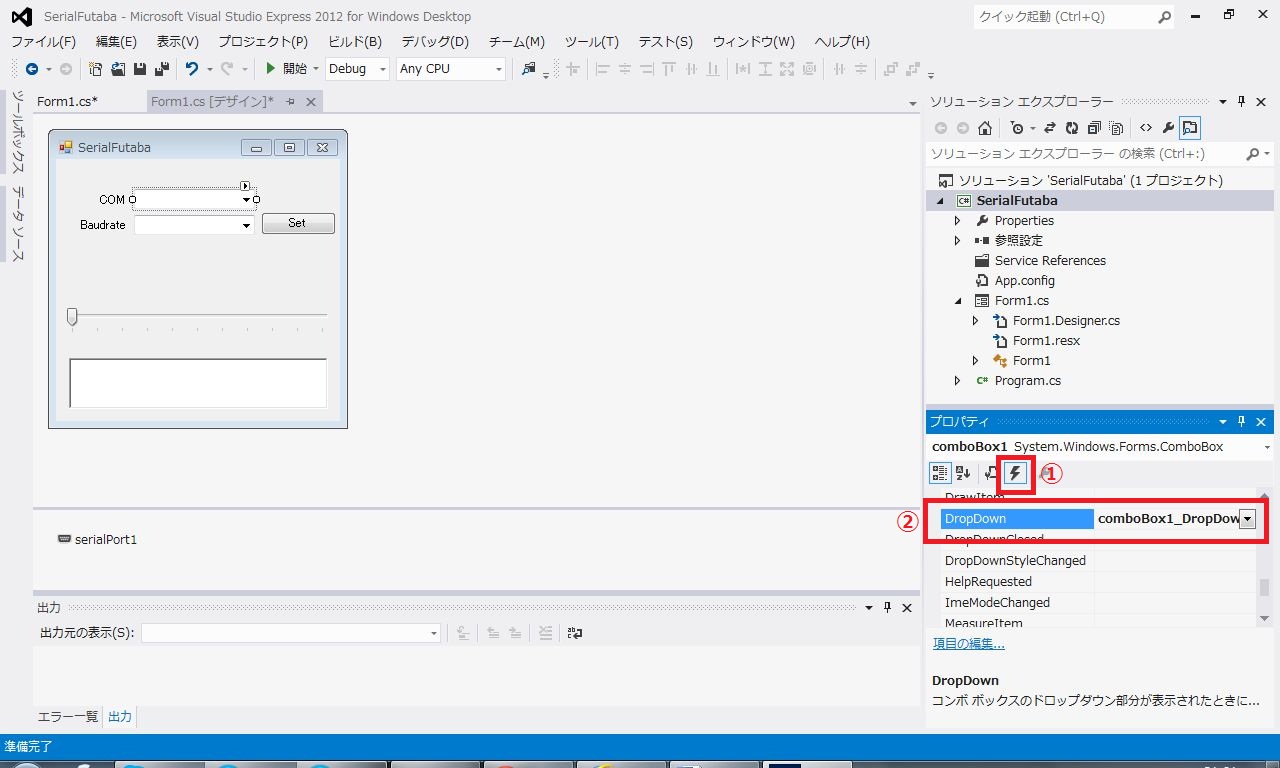
↓ テスト中画像

先週末に浅井製作所様へ工場見学へ行った時の品数と在庫の豊富さに驚きまくり、全部把握してるのがすごい。
ロボット製作に欠かせないねじの大事さに感謝しつつ脚部の製作に入ります。
過去の記事はこちらから
2足ロボ作ってみよう、市販部品集めて (ボディ編)
2足ロボ作ってみよう、市販部品集めて (腕部編)
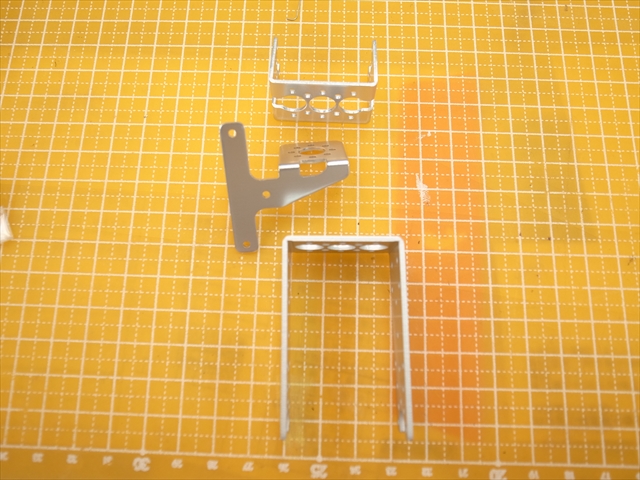
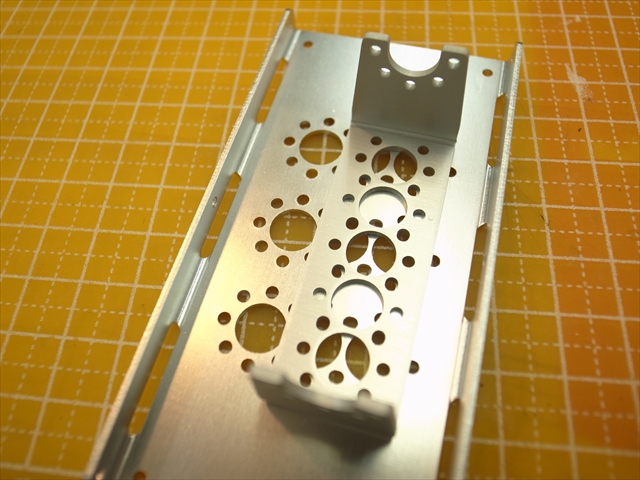
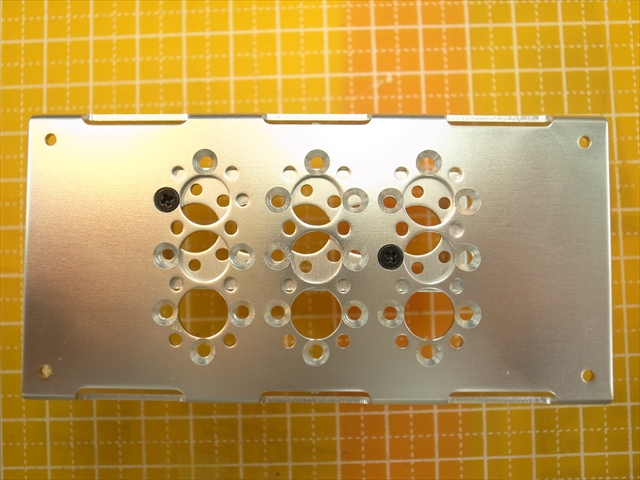
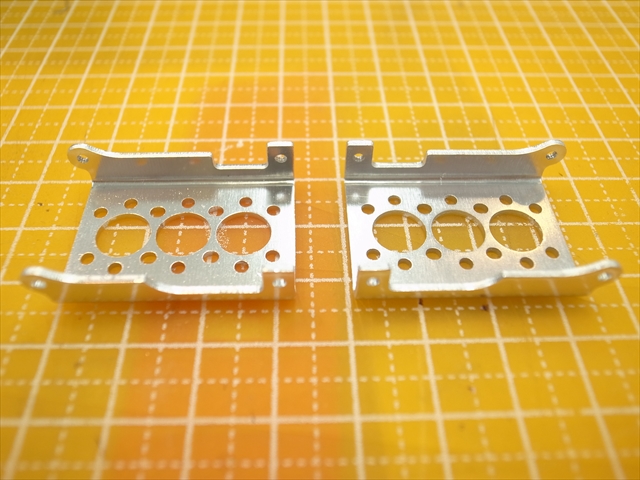
よく来る質問で「アルミブラケットEってどう使うの?」というのがあるのですが、今回製作する足では2セット使っています。
これがセット内容、1袋に2組分入っています。

ここにサーボを2個つけてピッチ軸とロール軸を1列で構成します。
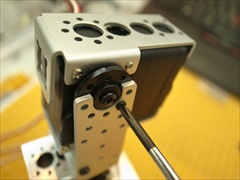
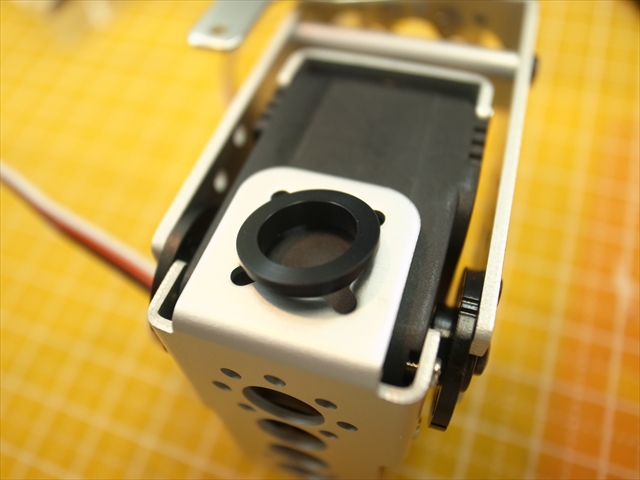
まずピッチ軸サーボを組み付けます。

ネジは4本とも外してしまい、付属のM2x25ビスで固定します。トップケースが外れないよう注意して作業します。不安ならラベル側の2本は後から抜いても大丈夫です。
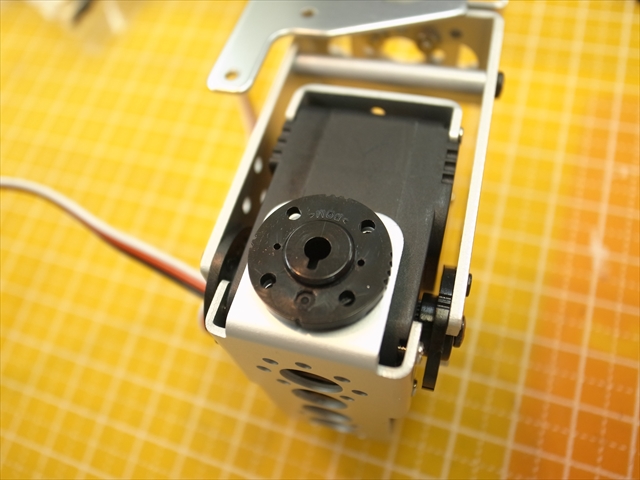
続いてロール軸サーボを固定します。
ここは反対軸は不要なので標準ボトムケースに交換するか、切り飛ばしてしまいましょう。

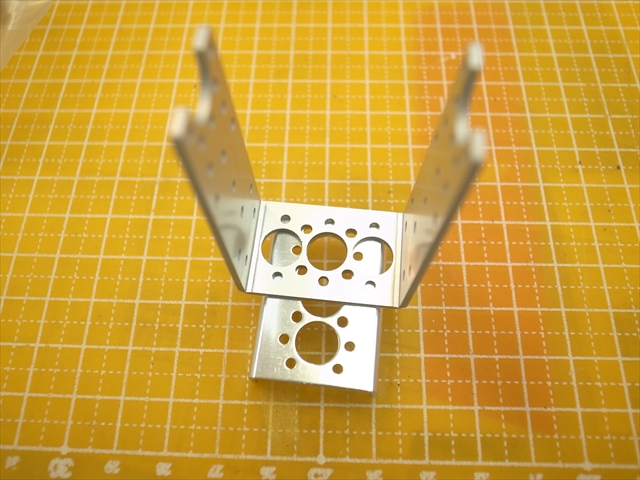
もうひとつのブラケットを固定していきます。
取り付ける際にちょっと力がいるかもしれないですが、方向さえ合っていればきっちり収まります。

これを計4セット組み立てて、直交パーツは完成です。
続いてスネ部分を組み立てていきます。
使用部品はアルミアームロング、中継ハブステー、アルミアームです。
組み方としてはこんな感じ(右足用)。
厚みのある部品が3枚重なるのでネジはM2x6程度のモノを使い、M2ナットで固定します。
あとからバラすのも大変なのでネジロックを使って締めていきます。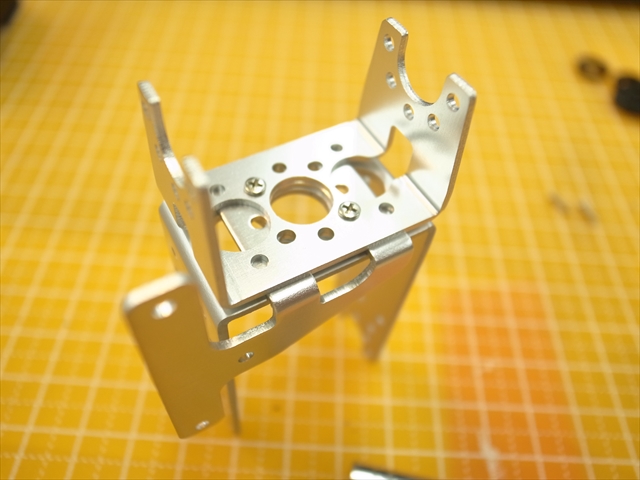
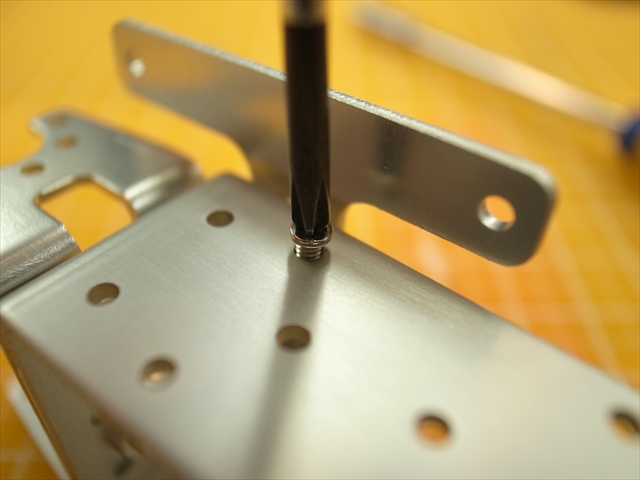
補強用アルミパイプを付属のM2x8で締めていくのですが、中継ハブ側はハブを固定する際に干渉してしまうので、低頭ネジを使います。
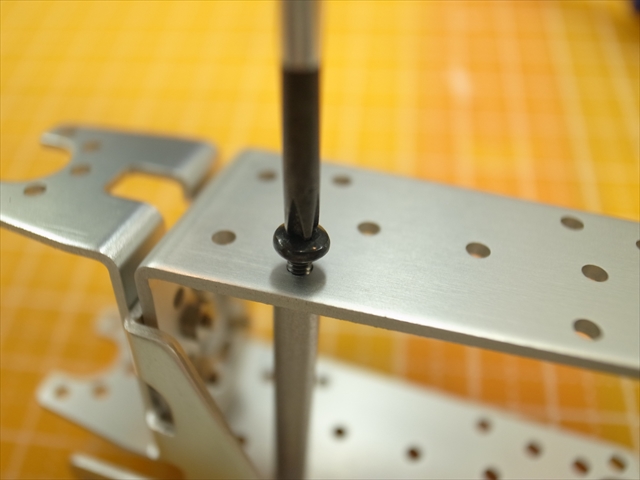
反対側は付属のM2x8でOK.
左足用もここで組んでしまい、すね部分は完成です。
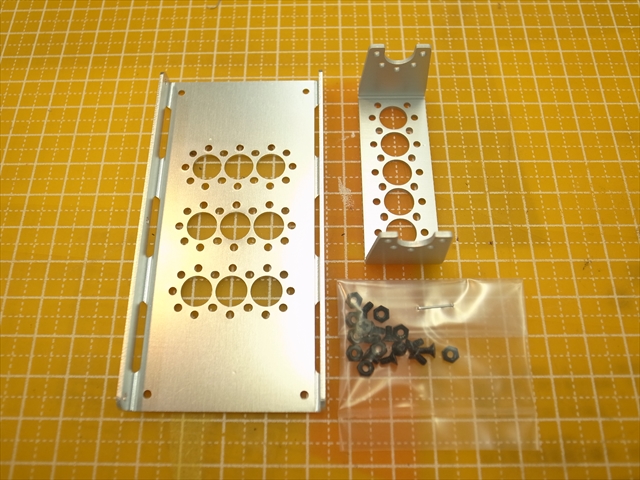
次は足裏部分を組み上げます。
使用部品はアルミ足裏セット、アルミアームワイド各1セットです。
足裏は取り付け位置がたくさんあり自由度が高くなっているので、お好みの位置でアルミアームワイドを取り付けられるようになっています。
今回はこの位置で固定します。私がいろいろ試してみてこの辺りが一番動かしやすかったので。
付属の皿ネジとナットで固定します。
6箇所ネジ止め出来ます。
線対称で左側も組み立てます。これで足裏部品は完成。
さぁ、ここまで作ったパーツ群を結合していきます。
まずブラケットEで組み上げた部品に付属していたスペーサーとホーンを取り付けます。
ホーンは挿すだけ、落とさないよう注意してください。
ここに足裏パーツをM2x3ネジで固定し、ピッチ軸にすね部品を組み付けていきます。
反対軸にフリーホーンを付けるのを忘れずに。
できたっ!
続いてモモ部分を組み立てていきます。
使用部品はアルミアームロングとアルミブラケットA,Bです。
このブラケット、なぜA,Bという記載になっているかというと切り欠きやタップ穴位置が線対称のパーツになっているので「AとB」1セットになっています。どっちがAかはわかりません。
こんな感じに組み付けます。
この組み方にすると屈伸させた際にひざ裏側が干渉してベタ座りができなくなるのですが、V-SidoやChoreonoidに対応させる際に「出力軸が一直線になってるとありがたい」との意見を頂いたのでこのような組み方にしています。
起き上がりも特に問題なく出来ますのでいいかなとは思っています、お好みでパパッと組み替えて試せるのも市販パーツの醍醐味ですね。
アルミブラケットA,Bにサーボを組み付けて、先に作ったすねパーツ一式と結合していきます。
補強用アルミパイプも組んでしまいます。ここは付属のネジで大丈夫です。

続いて中継ハブステーに中継ボックスを取り付けて…
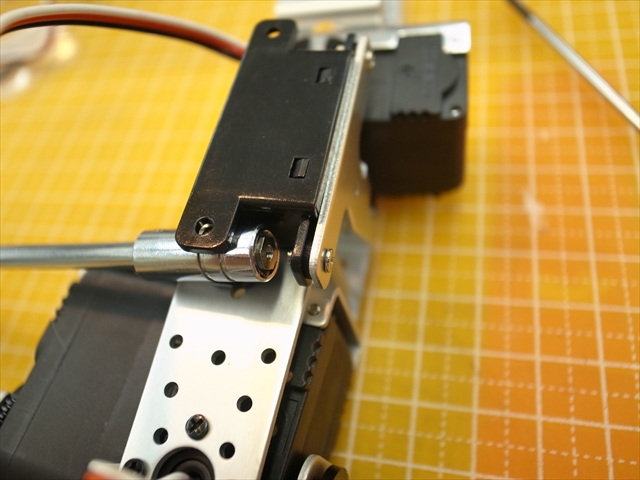
そうそう、前回書き忘れていたのですが、このソケットドライバー ちょっと改造していたりします。
ソケットが深すぎてナットが奥に入ってしまい、上手くネジに入ってくれなかったりするので中に詰め物をしてナット1個分だけでフラットになるようにしています。このほうが圧倒的に作業性はよくなります。
ブラケットEで組んだ直交パーツをももパーツに結合して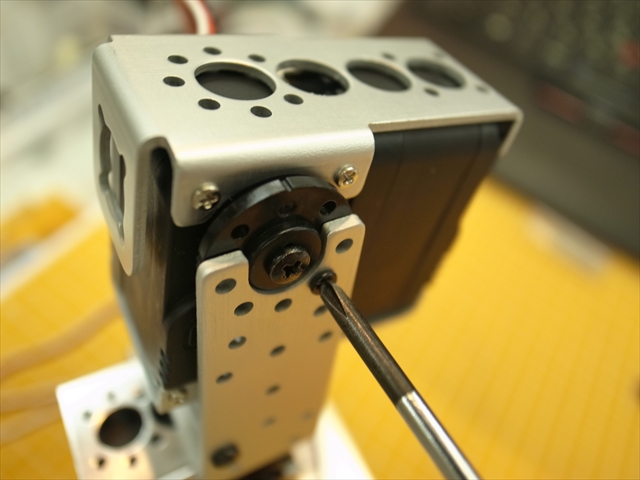
胴体と組み合わせてっと。
両足とも取り付けていきます。
各ケーブルを中継ボックスに挿していき
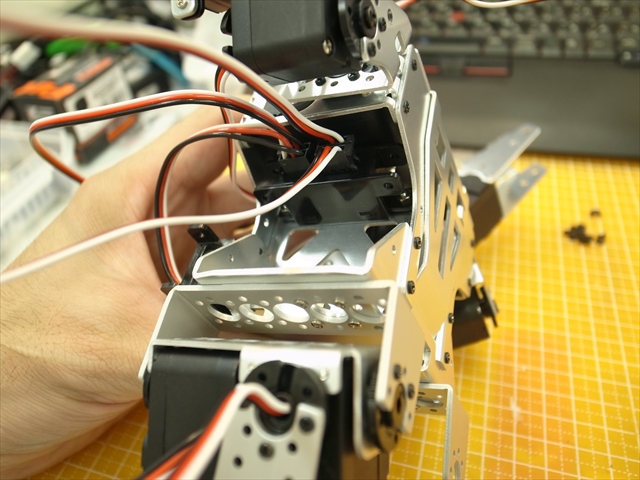
ケーブルを束ねていって
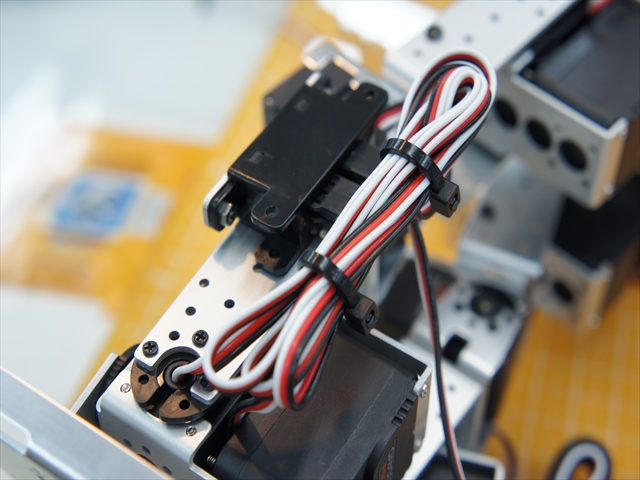
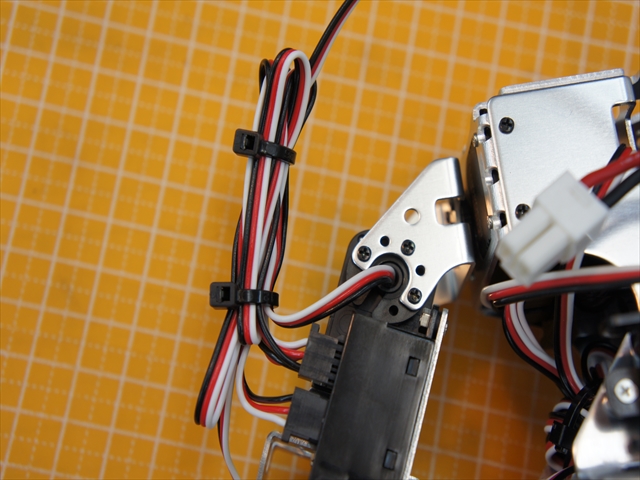
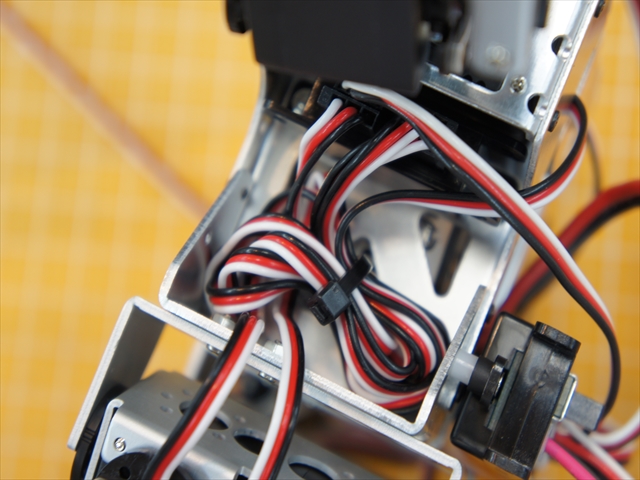
ケーブルを束ねていく際の注意点として、可動させた時に引っ張られたりしないようある程度の余裕を持たせてまとめていきます。
あと結束バンドで締めて、余り部分を切るときに一緒にケーブルを切ったりしないように。よくあります…
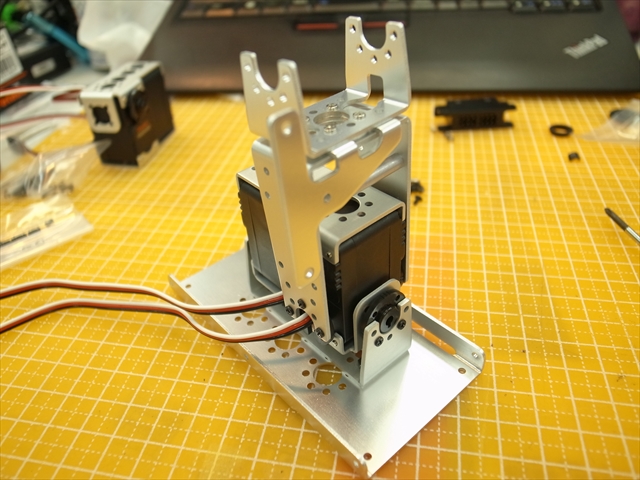
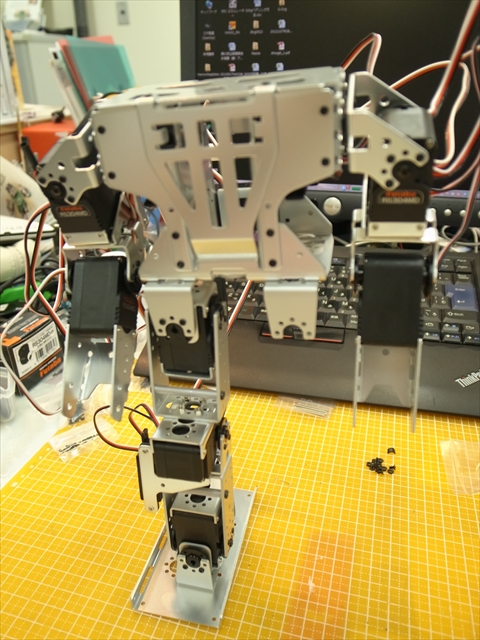
完成っ!
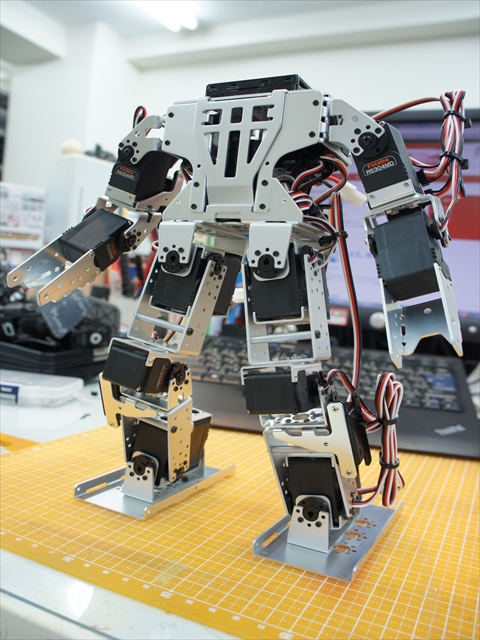
Blog時間でここまで3週間 ついにRIC30になりました。
これで7月7日開催の第8回U1Kにも間に合うってもんです。
今回の製作記事を参考に1kg以下の小型機を1台組んでみてはいかがですか?
次回はモーション作成に入ります。
あ、その前に初期設定とかからですね。
ではまた次回ッ!
 RIC30 |
 RS304MD-FF |
 【G-ROBOTSアルミパーツ一覧】 |