アールティロボットショップではサマーセールが始まっています。
皆さん、知っていましたか?
実は双葉電子工業の他のサーボシリーズや、HPIジャパンのGR-001シリーズで使われているサーボやデアゴスティーニのROBO-XERO、姫路ソフトワークスのJO-ZEROのサーボ等々、これらのシリーズのサーボモータは双葉電子工業のOEMだから同一メーカー製なのです。つまり、同形状であれば、ギアなどの補修部品もお互いに使えます。w
アールティのサマーセール、双葉電子工業、HPI、ROBOTISの全製品が10%OFFというチャンスですので、皆さん、この機会にこの連載用の機材も購入をご検討ください。w
今回は、実際にサーボを動かすためのTrackbarの設定といいたいところですが、パケットを眺めるところまでを解説します。
フォームのほうはすでにTrackbarが置いてありますから、まずはRS405CBのマニュアルを眺めることにします。ROBOTISのところでは動かすことに集中して、あまりロボット用サーボの細かいところには触れていませんでした。
先ほど、上にも書きましたが、双葉電子工業はOEMをたくさん出していますので、ここで学んだ知識は他のOEM製品でも応用がききます。ロボット用サーボの豆知識も交えて話を進めたいと思います。
まず、2ページ目を見てみてください。
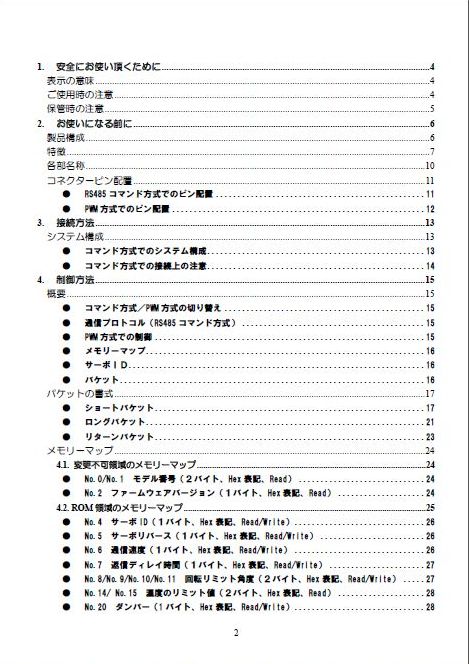
ここは目次のページですので、目新しくないじゃないかと思われる向きもあるかもしれません。
安全とか保管とかは実はよく読んでおくといいところですので、後でしっかり読んでください。
注目すべきは2のコネクターピン配置のところです。
目次を読み進めていくと、2の下のほうに、「RS485コマンド方式でのピン配置」とか、「PWM方式でのピン配置」と書いてあるのですね。PWMが何かを知っている方には、む?RS405CBはコマンド方式ではないのか?と疑問に思われる方もいるでしょう。双葉電子工業のサーボモータは、非常に面白い構造をしていて同じピン配置でコマンド方式もPWM方式もどちらもいけるという特徴を持っています。
ここでいうPWMというのはラジコン(ラジコンって実は登録商標なのですよね)特有のサーボ(RCサーボと言う事にします)信号周期4~50ms(RS405CBの場合、一般的なラジコンでは20ms周期)のうちのONの信号の長さが角度を示すというプロトコルです。簡便なのでRCサーボではよく使われます。詳細は15ページに書いてあります。
RSシリーズは、モードさえ切り替われば、コマンドサーボとしてだけでなくRCサーボのようなPWM方式でも駆動することが可能です。コマンド方式とPWM方式は、電源投入時の信号入力で自動で振り分けられて、電源が切れるまでそのモードになります。(詳細は11ページ以降を参照)
また、ここで、RS405CBの特徴であるデイジーチェインの注意点を見ていきましょう。
デイジーチェインとは、サーボを介して次のサーボとつなげられることを言います。
ケーブルが短くてすむため、ロボットの総重量を減らしたり、メインコントローラへのケーブルの集中を防ぐという利点があります。
12ページを見てください。RS405CBは1電源に6個までつなげると書いてあります。理論的には255個まで接続できるのですが、そこまでは電力が足りません。電源から遠いサーボほど出力が弱くなりますので、下図(マニュアルから抜粋、転載)では通常①が最も出力が高く、⑥が最も弱くなります。
このとき下図のように両側から電源を供給するように接続することで、出力をより均等に近づけることができます。
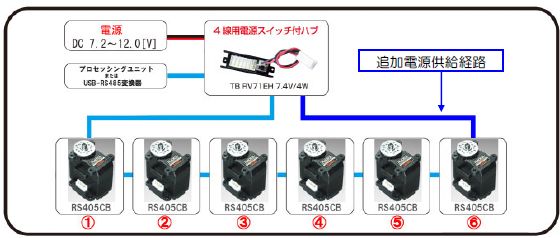
これを実現するためにRS405用の長いケーブルもアールティから発売していますので「追加電源経路」用に使ってみてください。(ちなみに2個とかだと電力が逆流してRS485チップが壊れることもあるので、ケーブルをつなぎすぎるのも考え物です。)

パケット通信の方式
RS405CBのパケットには次のプロトコルがあります。
- ショートパケット
- ロングパケット
これ以外に、返り値を返す「リターンパケット」があります。
P17を見てください。
ショートパケットの作り方が書いてあります。
図を抜粋してきました。割とシンプルです。
![]()
P21を見てください。
ロングパケットの作り方が書いてあります。
こちらも図を抜粋してきました。

両方とも眺めていると、それぞれROBOTISとよく似ていますね。
違うところは、データの上位と下位を入れ替えて作るところでしょうか。
実際作ってみるとわかりますが、上位と下位が入れ替わってパケットになるのはちょっとわかりにくくなる感じではあります。
チェックサムの作り方もROBOTISとは異なります。
この辺の実装を来週やりましょう。
 HPIのセールへ |
 Futabaのセールへ |
 ROBOTISのセールへ |