こんにちは。yukiです。仕事で沖縄に来ています。航空関連のお仕事なので空港の制限区域内にいたのですが、滑走路を歩いていたら上からの日差しと下からの照り返しで目がチカチカします。
今日はyukiが出張中のためRS405CB機材の動作確認ができないのでC#講座のblogはお休みです。
そこで、今回は講演内容のダイジェスト+αバージョンの話題です。例によって長文注意なので、お手すきの時間にどうぞ。w

エウレカコンピューターの山下社長とは人工知能学会の展示でずいぶん前に知り合ったのですが、学会以外にもGoogleやいろんなイベントで会うことの多いソフトウェアの会社さんです。エウレカコンピューターの人工知能学会での展示はいつもエキサイティングです。次回はうちも真似して研究発表の場のようにしたいと思っているくらいです。w
そして、山下社長は人工知能の未来を語るという趣旨でこれからも講演会やイベントを開いていきたいということで、光栄にも第1回の講演者としてお招きいただきました。
下記のように、さる2013年7月6日にゲンロンカフェ(五反田・東京)にて、エウレカコンピューターさん主催のA.I. FMという講演会でお話をさせていただく機会があり、20分ほど講演してきました。
このブログを読まれている方はよくご存知とは思いますが、アールティはロボット屋さんです。
でも、講演会にいらしてくださった方はゲーム関係者を中心にロボットとはあまり関係のない方がほとんどでした。また、場所がゲンロンカフェということもあり、理系と文系の融合という感じで、歴史的、哲学的な話しも込みで人工知能とロボットと未来について語ってきました。
まずは、自己紹介。
過去の研究者としての人工知能の略歴を紹介。w
若かりしころは人工知能学会でベストプレゼンテーション賞をいただいたり、ファジィ学会で奨励賞をいただたりもしたことがあるのですが、まぁここではそんなことはどうでもいい感じで、研究者のはしくれをアピール。w
そして、会社のミッション「ロボットのいるくらしを考える」の紹介。
アールティは、販売店としてのほうが有名ですが、今回のテーマでもある人工知能のボディとしてのロボットを実現すべく、会社のミッションに基づいてロボットを身近なものにしたいと日々精進しております。
さて、人工知能とロボットという話題なので、ロボットの歴史を紐解いてみます。
ゲンロンカフェでしたので、ちょっと文系っぽい話題を織り交ぜてみました。
ちなみに私は技術史も大好きです。
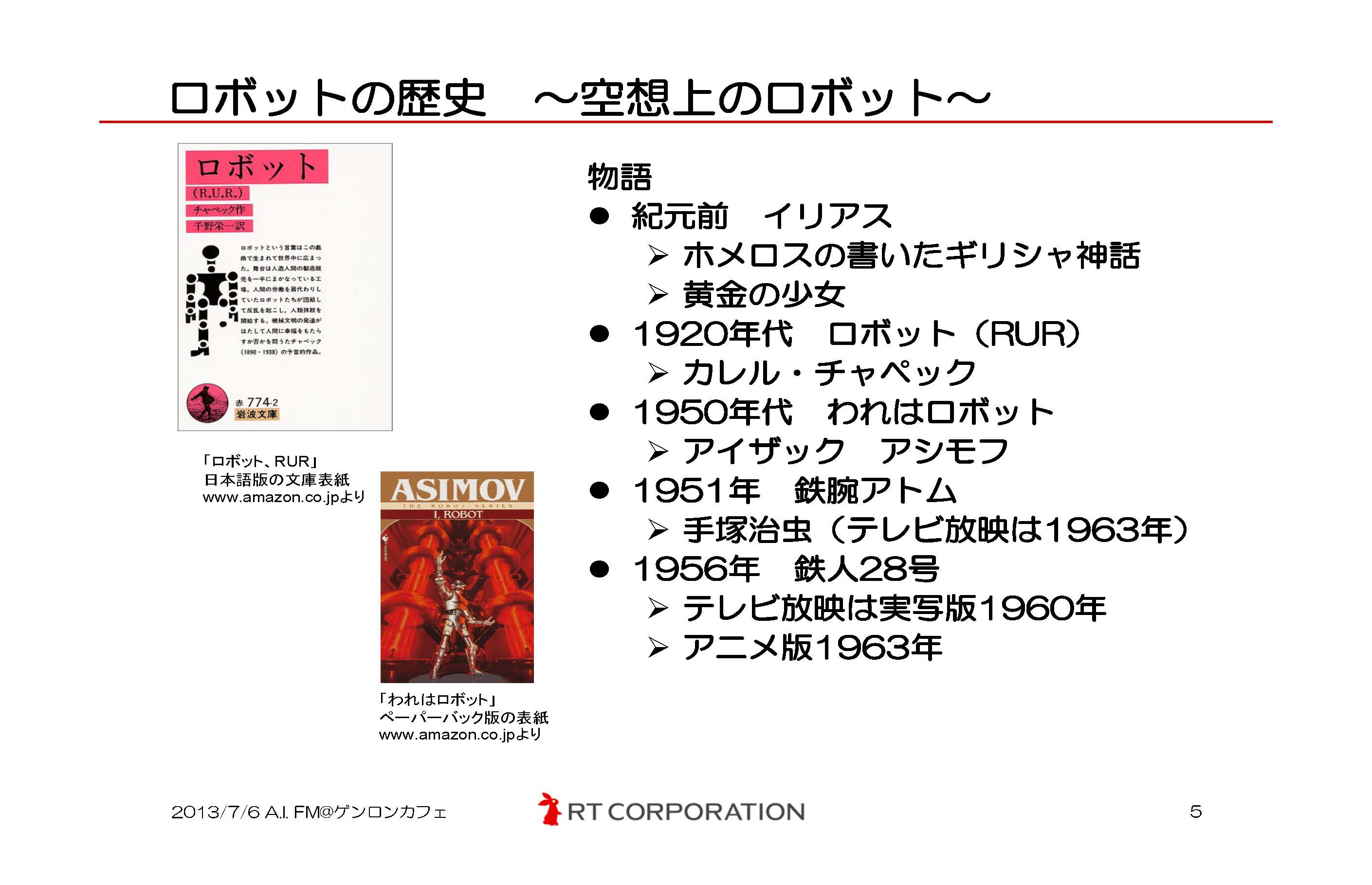
まず、概念上のロボットに相当するものは、実はギリシア神話時代にさかのぼるとも言われています。
イリアスという神話に書かれた「黄金の少女」という鍛冶の神様(足が不自由だった)の歩行支援をするような描写があるといわれています。(補足:昔、鍛冶は「たたら」とか「ふいご」という火を燃やし続けるための空気を押し出す装置を踏んでいたので、職業病で足を悪くする人が多かったそうです。たたらは映画のもののけ姫などに出てくるので記憶にある方もいるかもしれません。)
アイザックアシモフの『われはロボット』をはじめとして、我々がぴんとくるものだと、鉄腕アトムとか鉄人28号などでしょうか。
では、いつごろから「ロボット」という名前が使われ始めたのでしょうか?
「ロボット」は、実は1920年ごろの東欧の国、チェコのカレル・チャペックというジャーナリストが「強制労働」という意味の「robota」という単語から派生させて作った言葉です。
1920年代といえば、第2次世界大戦前です。言論統制や社会主義が台頭してくる東欧で、カレル・チャペックは強制労働に借り出される人々を見て、ロボットの語源といわれる戯曲「RUR(ロッサムユニバーサルロボット)」を発表しました。これが今日私達が使っている「ロボット」という単語が生まれた時代背景です。
下の写真は、チェコのカレル・チャペックのお墓です。チェコに行って時間があればお墓参りに行く人も多い、ロボット関係者の間では、隠れた名所です。ちなみに日本では人気の高い絵画や美術品が多いアルフォンス・ミュシャも同じ墓地です。
ロボットは、概念上、文学上はいろいろなところにその描写があります。
では、いつごろから実際、今の私達が「ロボット」と思うようなものが出てきたのか。
それは1960年ごろのアメリカでできるロボットアームまで待たねばなりません。
その前に、今回は人工知能のボディとしてのロボットというお話ですので、人工知能の器として基本になるコンピュータについても見て行きたいと思います。(補足:これから見せる写真類は、アメリカのコンピュータヒストリーミュージアムやイベントなどで撮影してきたものなどになります。)
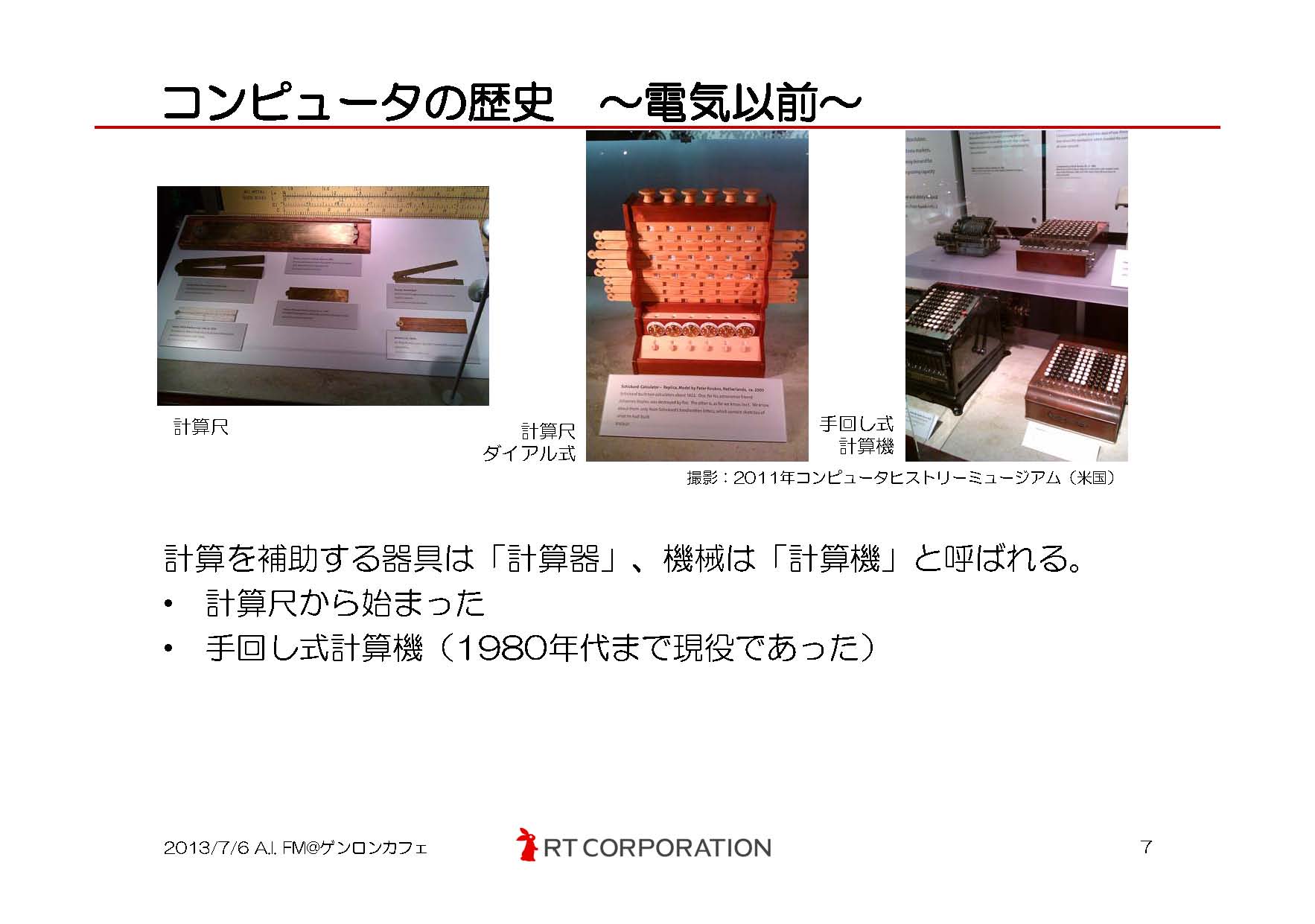
コンピュータは電気仕掛けになる前から「計算機」と呼ばれて、手回し式、計算尺、いろいろなものが考案されてきました。
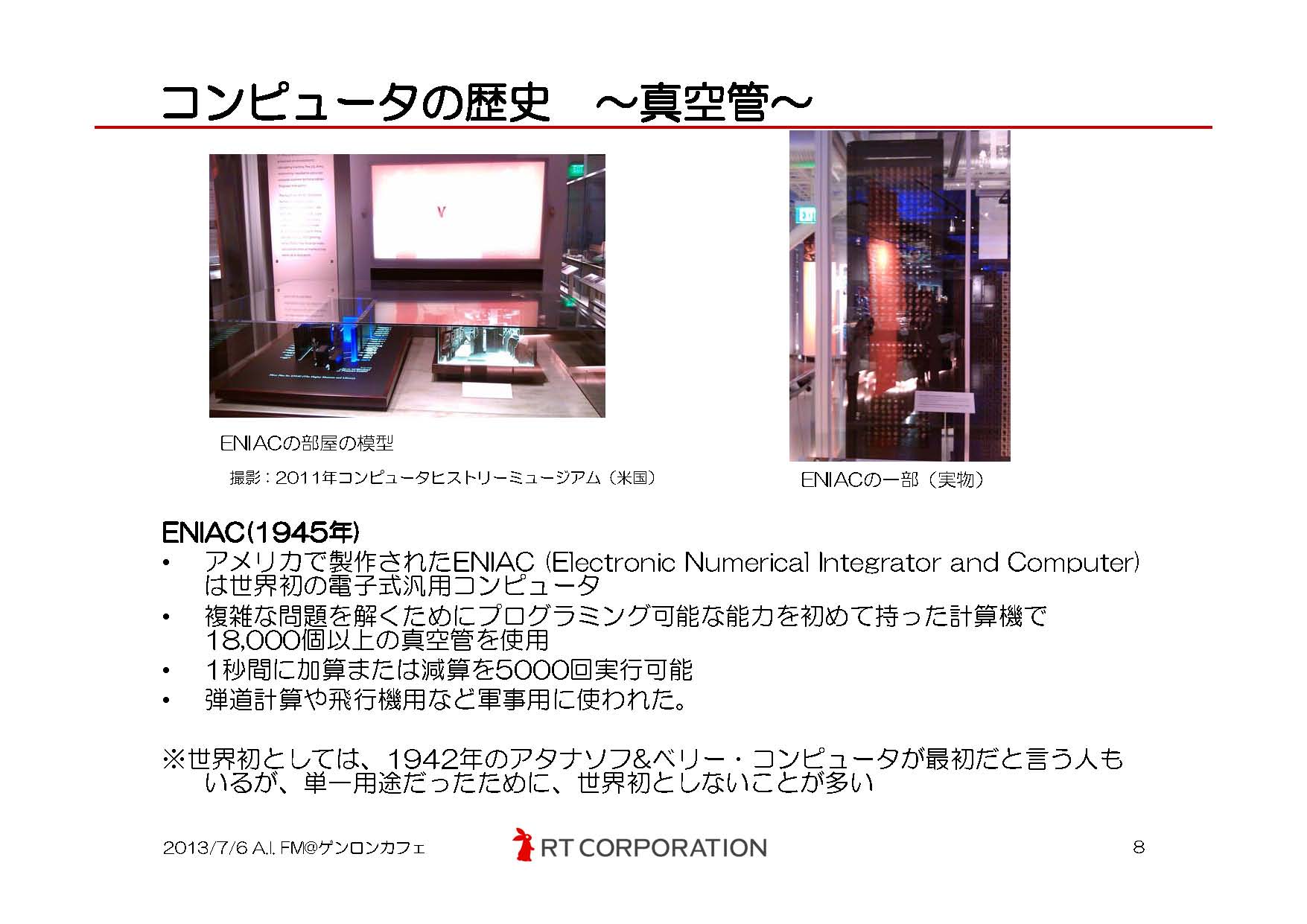
その後、真空管が発明され、ENIACなどの世界初のコンピュータと呼ばれる計算機が登場します。
(ゲンロンカフェのでの講演の参加者に女性がとても少なかったのですが、世界初のプログラマは女性だったそうなので、人工知能の分野においても、女性の活躍を大いに期待しています。)
さて、ここで、トランジスタの登場です。
日本のノーベル賞をとった江崎博士らで有名なトランジスタが登場することで、計算機がその技術の転換点を迎え、小型化が始まります。

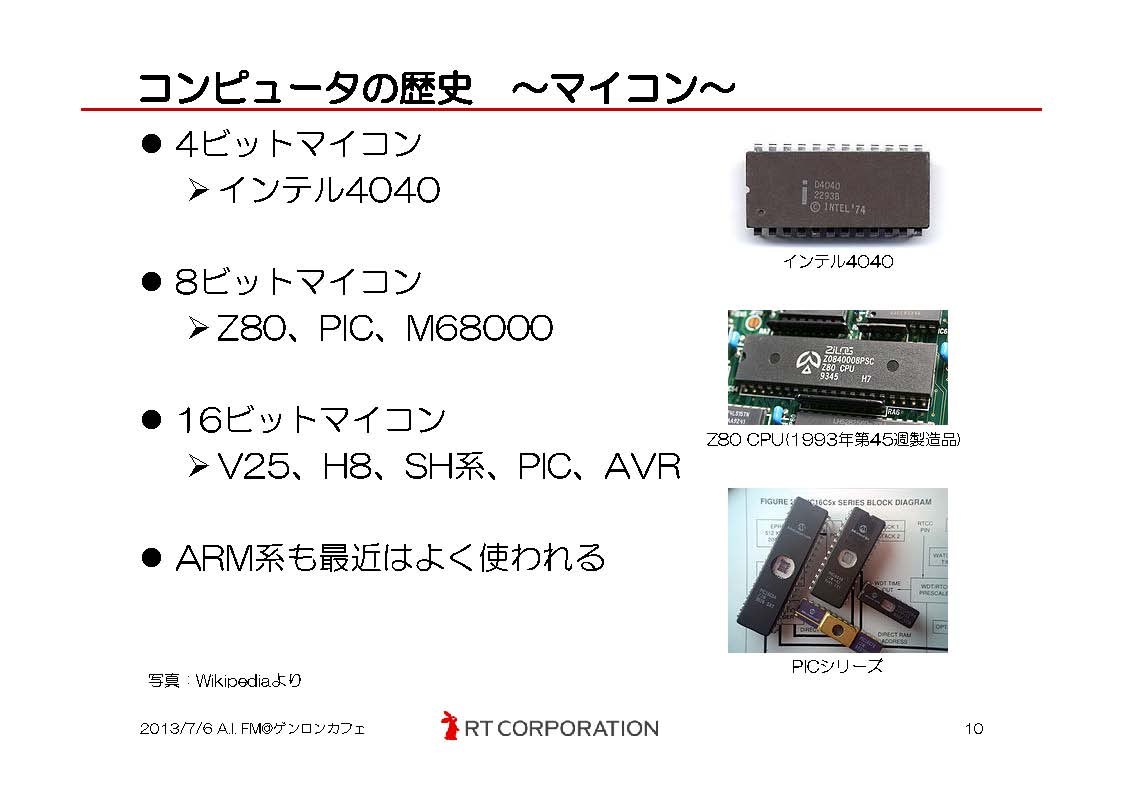
そして、40代以上の人には記憶のどこかにあるかもしれないですが、マイコン時代の幕開けが1970年代から始まります。最近ではマイコンも高性能化され、CPUなどと言っていたのが、メモリやその他の周辺機能とも一体化したMPUと名前を変え、スマートフォンをはじめとする高性能通信機器で活躍しています。ARMなどがその代表例です。
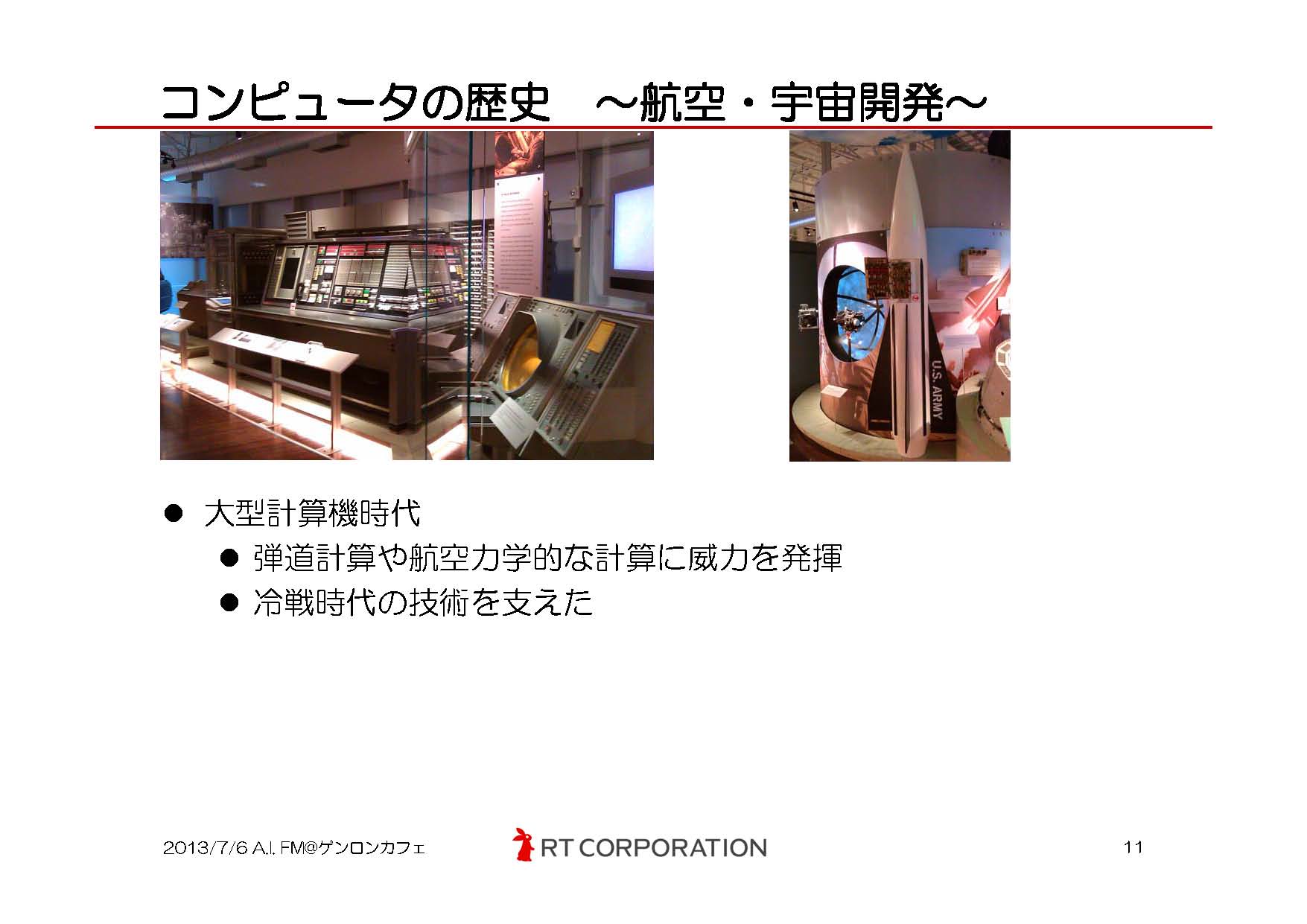
このような初期のマイコンが出てくることによって、時代がちょうど東西冷戦時代とも重なり、世界的には軍事、宇宙開発などに応用されます。大型計算機は1970年代から開発競争が激化し、その全盛期を1980年代に迎えます。その後はワークステーションなどの登場によりどんどん小型化、一般化されていき、1990年代にはインターネットの登場によりパソコンが隆盛を極めました。
その後は皆さんもご存知のとおり、1990年代後半以降のインターネットの普及と携帯電話の普及にあいまって、無線通信網も整備され、今日のスマートフォン時代に突入です。
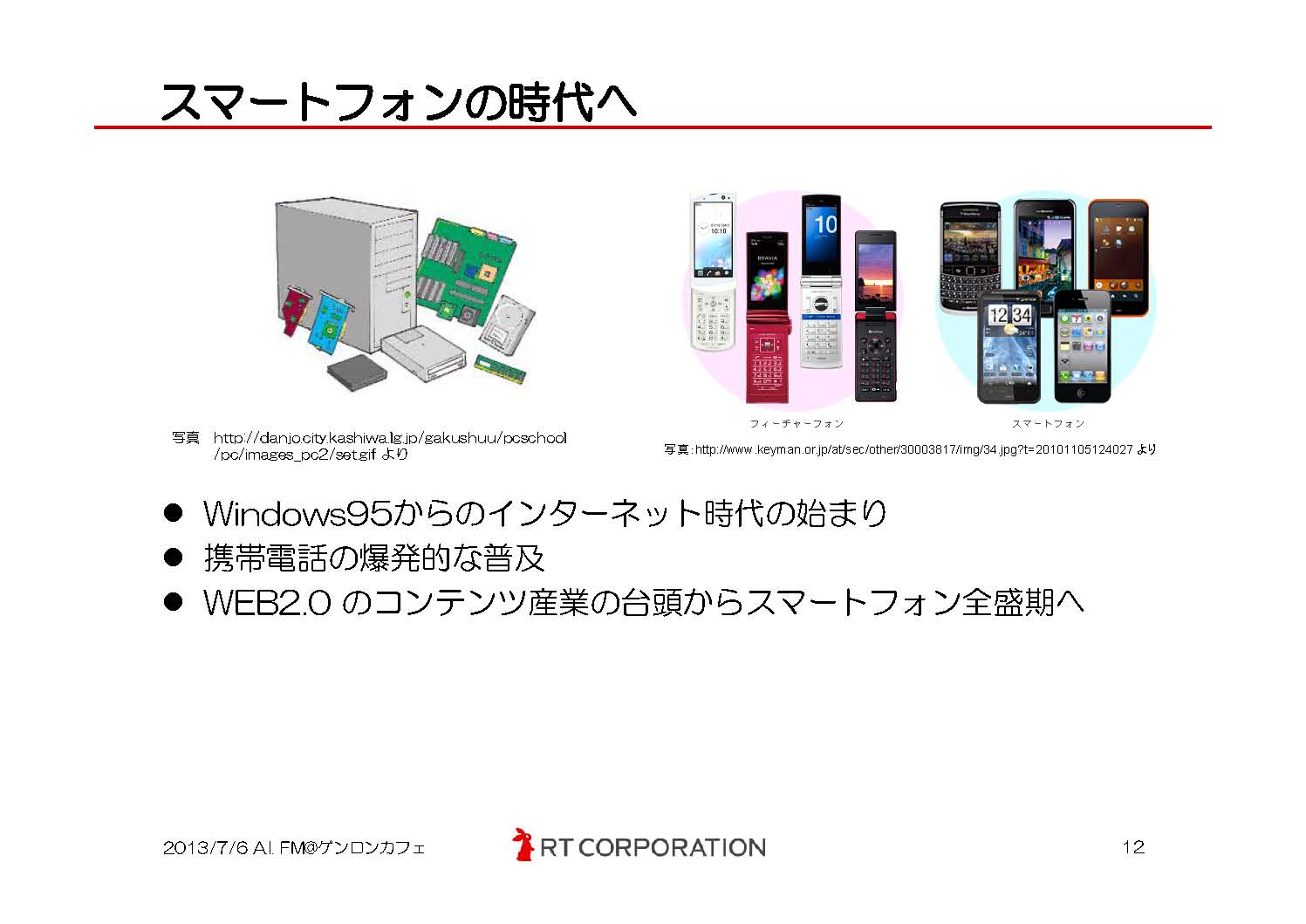
こういった人工知能としてのベースとなるCPUと大容量ストレージ、ネットワーク通信網は整備され、SNSをはじめとするバーチャルな世界は国境もなく広がり、なくてはならないコミュニケーションサービスとして定着してきています。
そして、人工知能は、これらのサービスの広がりとともに、大きく進歩することになります。
今ではどのスマートフォンにも搭載されるのが当たり前になった技術ですが、皆さんがお使いのスマートフォンや携帯電話のメールに使う漢字変換や音声認識。
私が学生だったPC時代の黎明期であった1980年代後半では、漢字変換や変換予測は人工知能の一大テーマでした。音声認識もそうです。
また、大規模データから所望の情報を抽出する技術も、当時はデータマイニングというキーワードの研究テーマで当時、盛んでした。現在では、ビッグデータなどという名前に変わり、ITビジネスの花形になっています。
そして、ITをはじめとする人工知能は1980年代後半から、バーチャルとリアルの融合を目指し始めます。人工知能研究でいうところの「知能ロボット」といわれる分野の登場です。
つまり、人工知能はコンピュータの中だけでの理想的な世界を飛び出し、より豊かで不確定要素の多い情報量を処理すべく現実世界へ進出しようとしています。人工知能にとってリアルな世界はバーチャルな世界から比べるとものすごく大変な情報の海と言ってもよく、まるで、水棲生物が進化をとげて地上に出てくるかのような大変化です。
そして、人工知能が現実世界へ出るためにリアルなボディを与えるのが「ロボット」というわけです。
皆さん、ロボットというとメカ的なものを想像するかとおもいますが、アールティの社員教育ではロボットを「コンピュータに手足の生えたもの」として教えます。
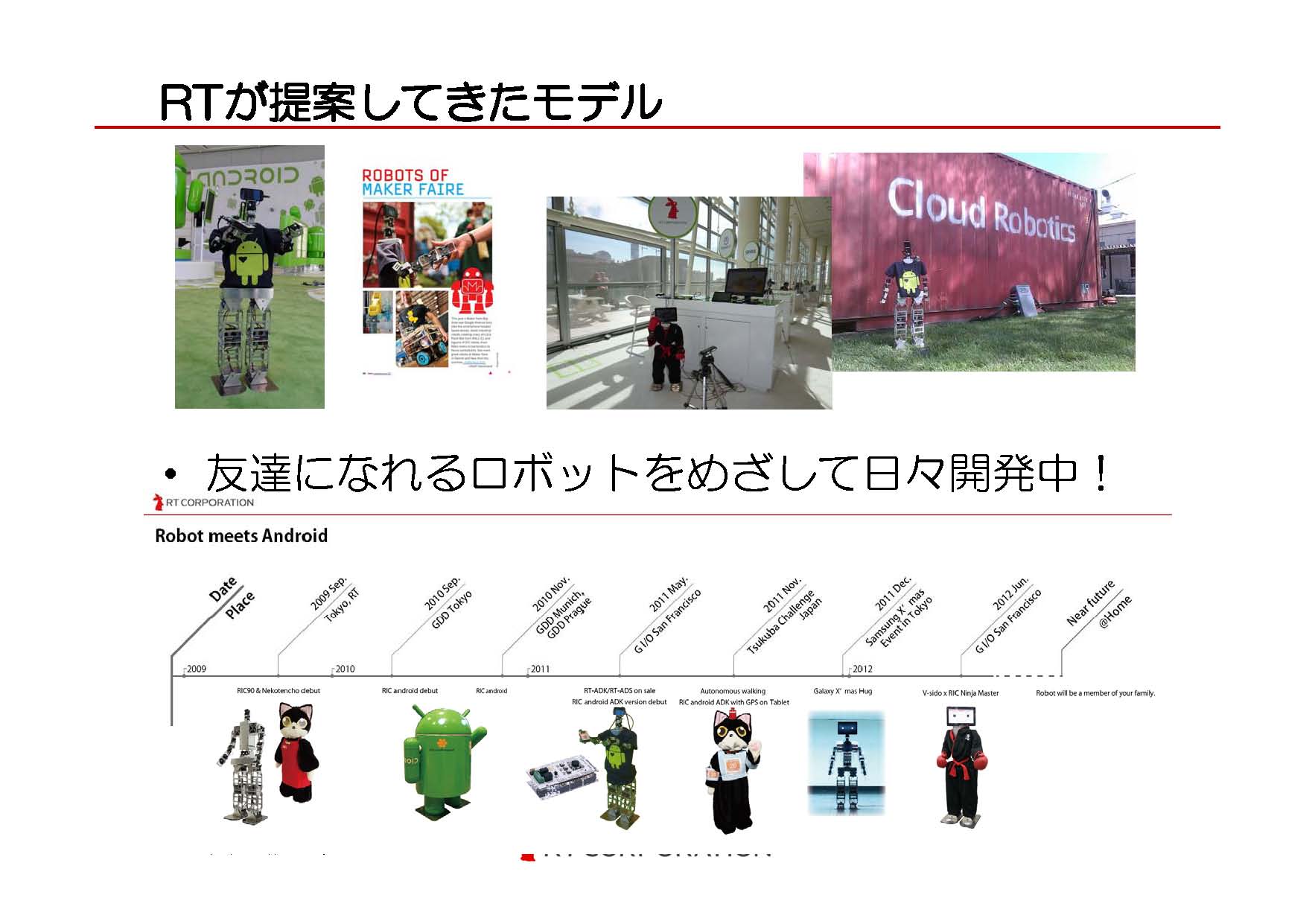
次に、アールティが提案してきているロボットを見てください。

どれも同じ型のロボットで、コントローラであるCPUを変えたものです。
Googleの開発者会議などでも紹介させていただいたり、海外ではときどき雑誌やテレビに出るのでわざわざ秋葉原まで見に来られる方もいるのですが、日本ではあまり報道されたことがないので、あまり知られていません。
このような人型ロボット、とりわけ身長が1mを超える大型機と呼ばれる人型をゼロから作り、なおかつ動かす会社は実は世界でもそれほど多くありません。
それは、人型ロボットはまだ開発されてない難しい技術も多いからです。
アールティが人型にこだわる理由は、人型に必要とされるメカ、電装系、制御技術、人工知能のすべてが他のどのようなロボットであっても応用がきくからです。つまり、アールティでは、最先端技術を磨き続けるためのフラッグシップとして人型ロボットを対象にして技術開発をしています。
***余談***
ゲンロンカフェではお話しなかったのですが、アールティはブログ「人型ロボット研究所」にあるように、人型ロボットの開発を得意としていろいろな受託開発をお請けしてきている実績があります。
**********
さて、次に人工知能のボディとしてのロボットを見ていきましょう。
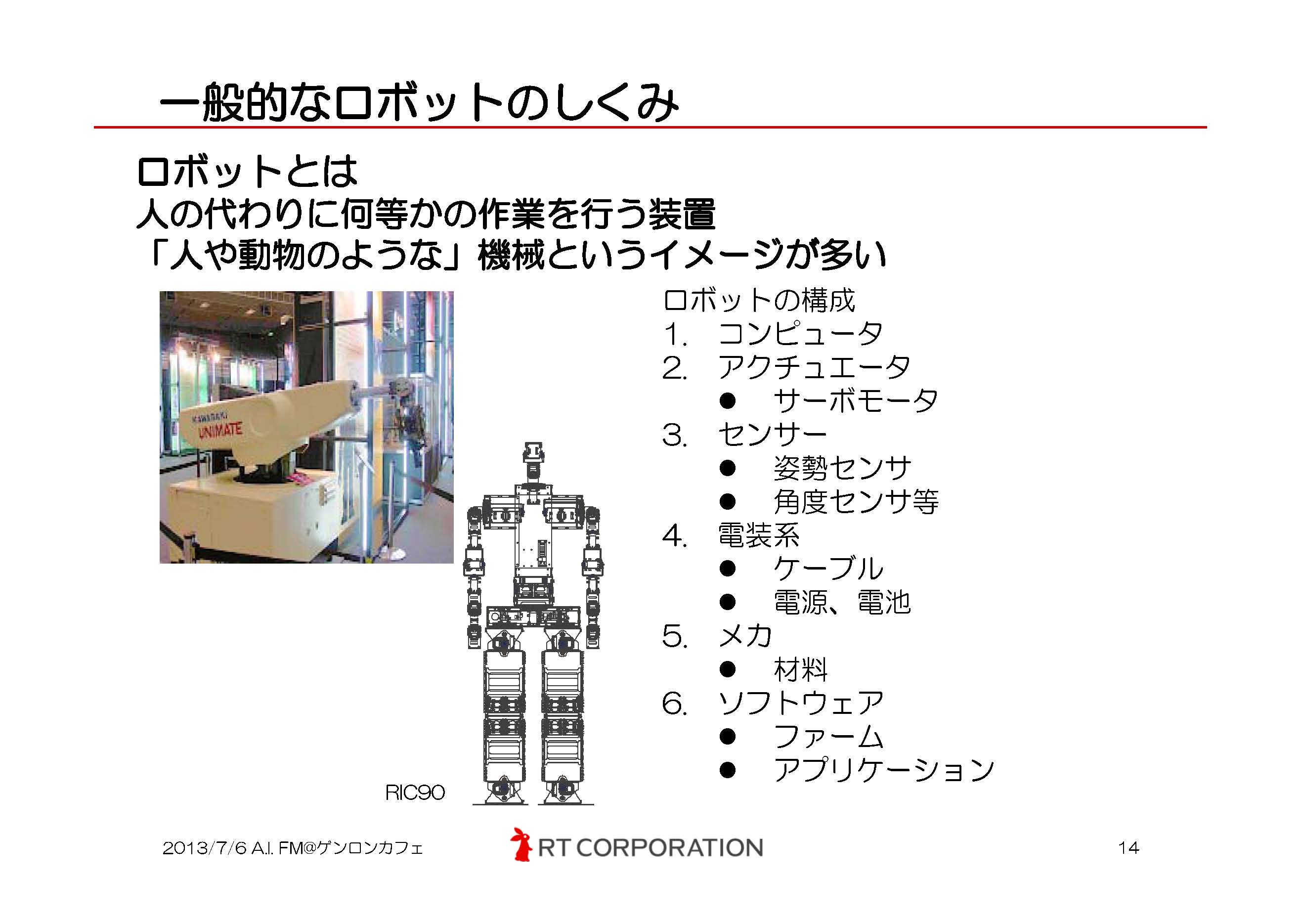
一般的にロボットは、メカ、電装系で構成されます。
この電装系に使われる制御や、人間とのインターフェイスが人工知能が担う部分になります。
「人工知能」が、というより「知能」とは、見ている者がいて初めて発現するとも言われます。
(正確には「知能は観測者によって発現する」といわれています。人間以外の知的なふるまいをする動物は本能的なものであったりする場合もあるので自分が知能を持っているとは思ってはいないことがほとんど。)
ロボットも知的なふるまいをして初めて、人工知能が搭載されていると思われます。
つまり、「制御」だけだと「機械」いわれることも多いのが現状です。
ではどうしてロボットが人工知能のボディになりえるのか見ていきましょう。
ロボットは動物を模したものや機能特化したものが多いです。
図を見てください。
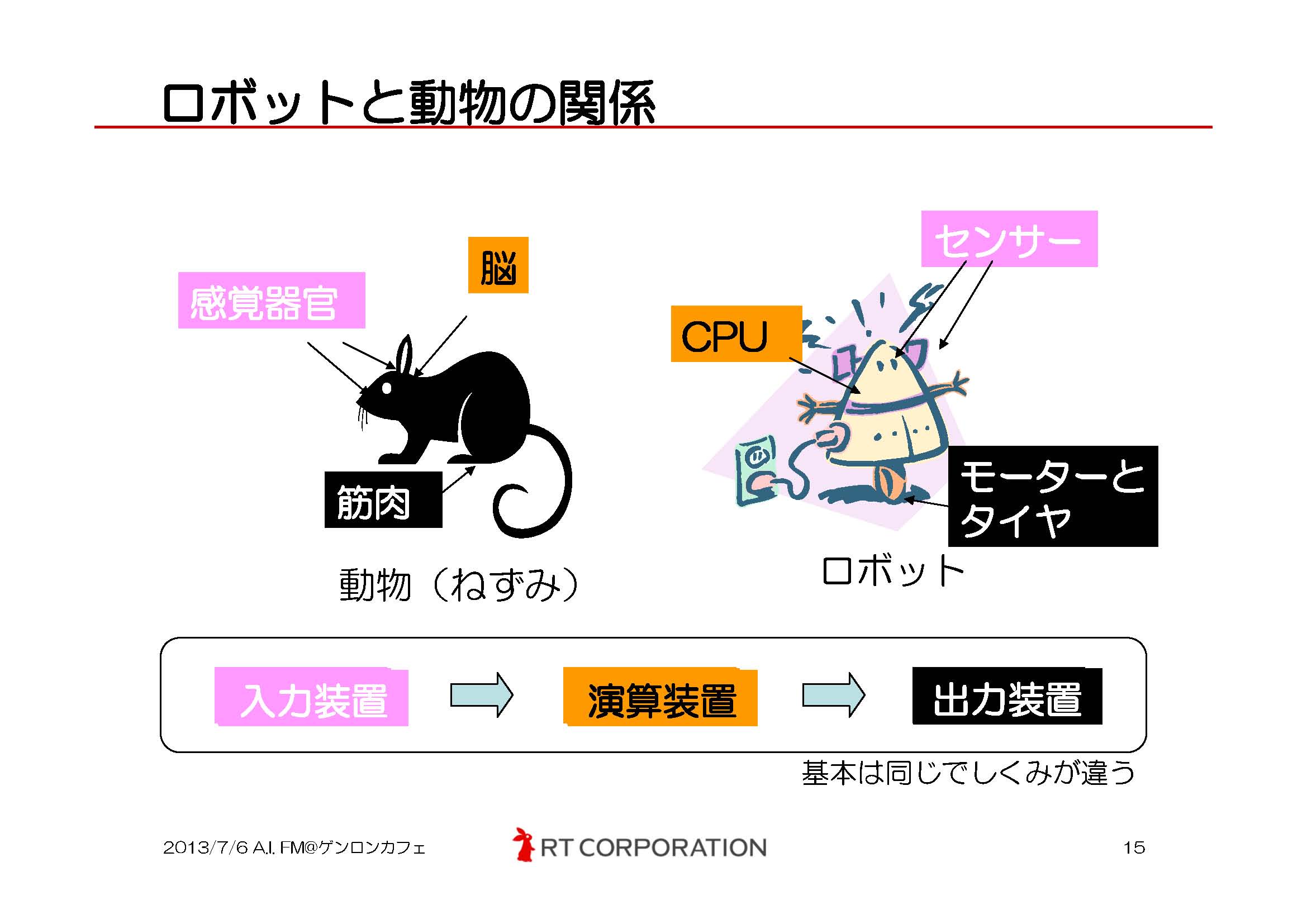
動物は感覚器官(目や耳などのいわゆる五感)を駆使して情報を収集し、脳で判断を下して行動します。言い換えれば、入力装置(感覚器官)で情報収集し、演算装置(脳)で判断を下し、出力装置(筋肉)を使って出力するといえます。
ロボットも一緒です。
入力装置(センサー)で情報収集し、演算装置(CPU)がプログラムによって判断を下し、出力装置(モータなど)を使って動作します。
ではロボットとコンピュータはどのくらい似ているか?
下の図を見てください。
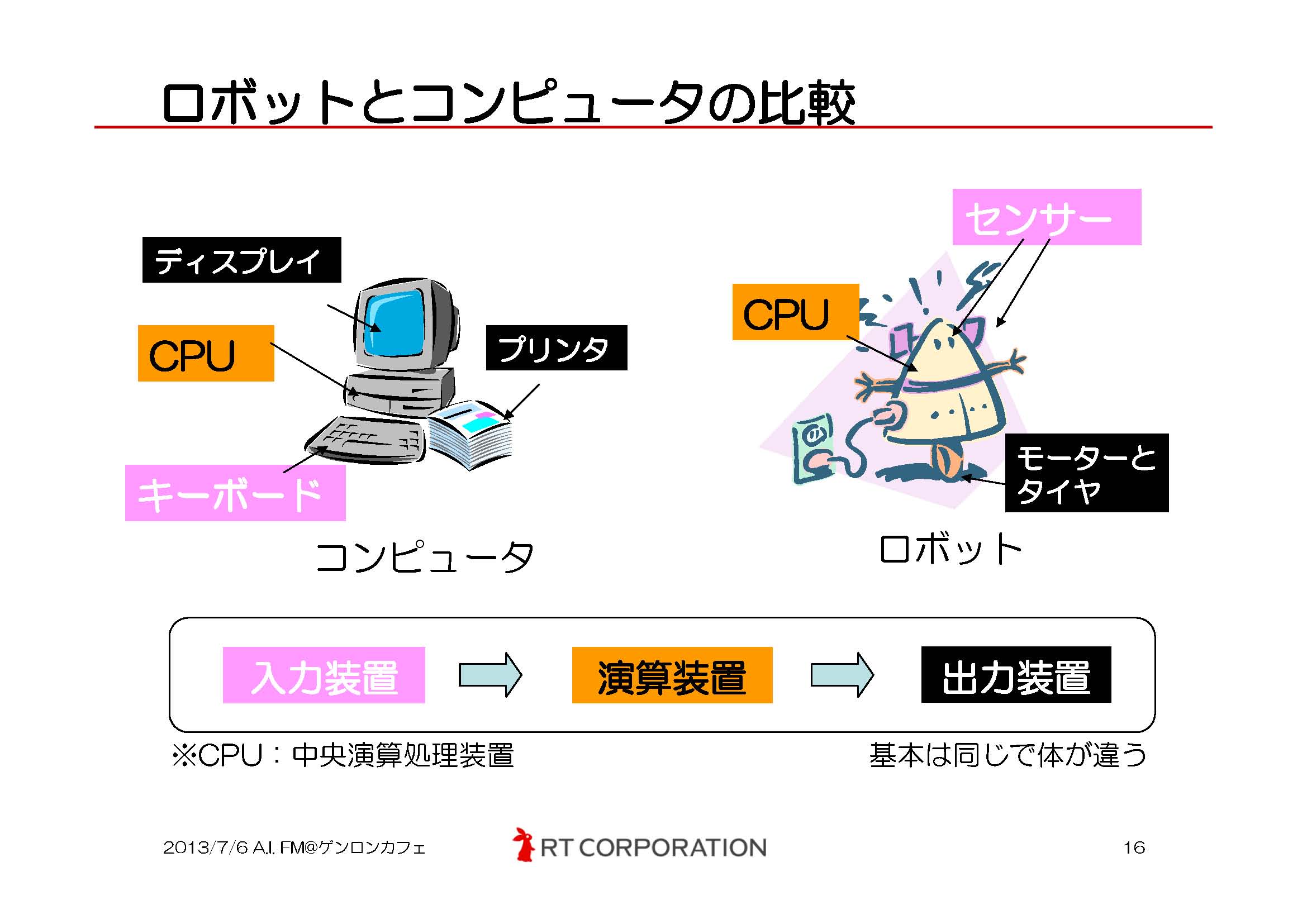
しくみは一緒で、入出力で使われる機器がちょっと違うだけですね。
ロボットはコンピュータのキーボードやマウスの代わりにカメラやマイク、ディスプレイやプリンタの代わりにモータや表示機がついたものだったのです。
では、どうしてロボットが人工知能のボディとして成り立つのでしょうか?
ロボットってそんなに進化しているのでしょうか?
次の写真を見てください。
これは、つくば万博(1985年)で活躍した、楽譜を見てピアノを演奏する早稲田大学の有名なWABOTというロボットです。
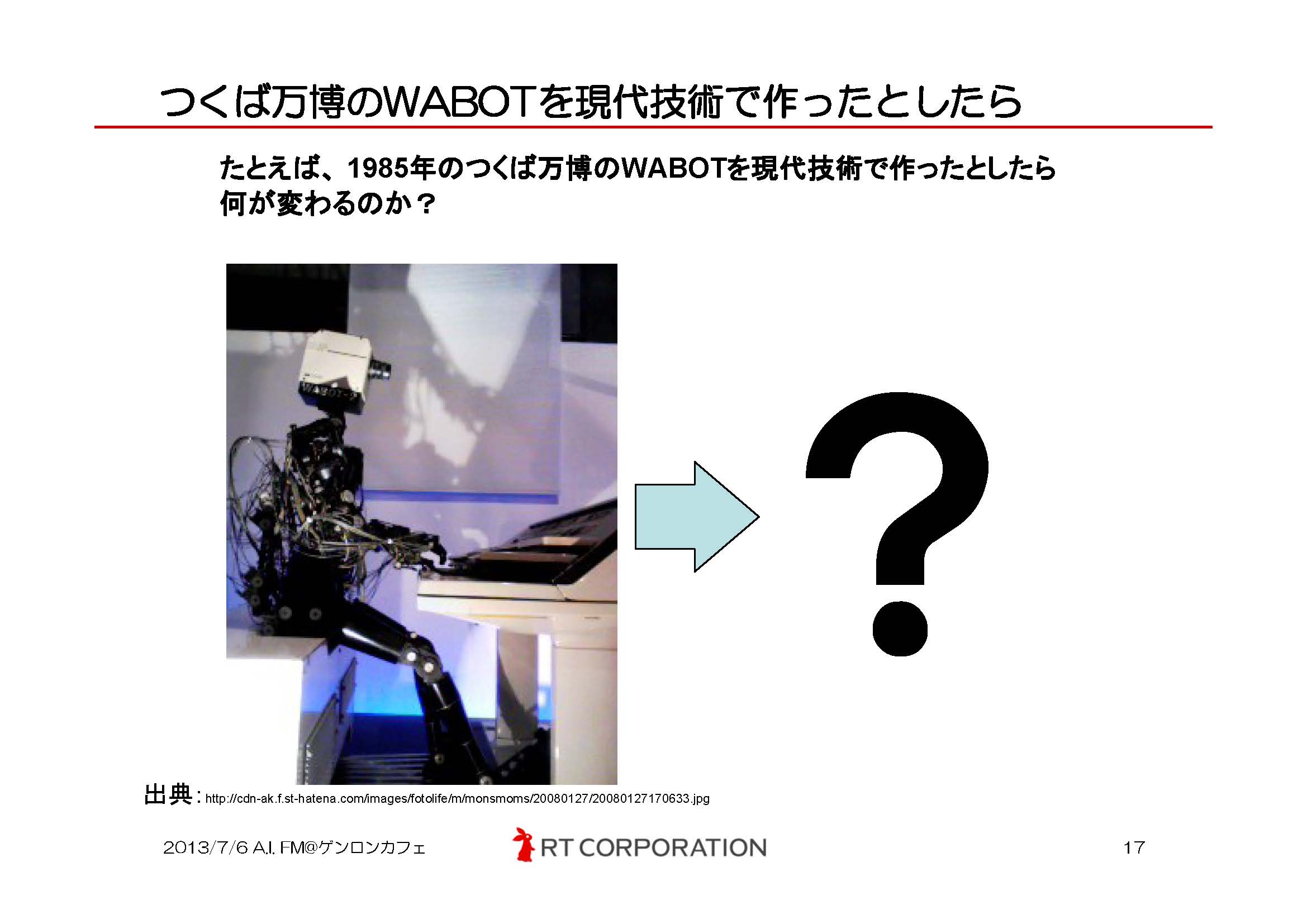
飲み会で、開発者である高西先生とこのロボットを現代の技術で再現するとしたら、という議論をしたことがあります。
実は、これを再現しようとすると
人工知能
CPU
MEMSのセンサ(カメラ等を含む)
しか置き換えるところがないというのが結論でした。
こんなお話を聞いたら、皆さんビックリするのではないでしょうか?
もちろん、多少の小型化はあったとしても、メカやモータそのものの技術はそれほどこの30年での進化はありません。
ここまで見てきて、我々が言っていた「ロボットはコンピュータに手足が生えたもの」というのがお分かりいただけたでしょうか?
次世代の人工知能は、実世界に接触できるロボットというボディを持つことによって発展すると言っても過言ではないでしょう。
みなさんが身近に思っている人工知能は1980年代にボディを手に入れました。
しかし、最近では進みすぎた人工知能の機能を十分に実現するに足るハードウェアであるロボットは実際にはありません。アールティではそういうサービスロボットを提供したい、と考えています。
皆さんが、私のお話を聞いて、もしロボットをやりたいと思ったら、ぜひ、1980年代に生まれ、今でも技術革新のある迷路解析ロボット競技会マイクロマウスから始めてください。
実は、日本のロボットだけでなくメカ系、電装系のトップエンジニアの出身者はマイクロマウス経験者であることも少なくありません。マイクロマウスはコンパクトな個人で開発できるロボットで、もともと人工知能を教えるためのツールとして開発された競技という経緯があります。メカの制御技術、電装系、人工知能、どれをとっても30年の間毎年進歩し続けてきました。

古いマイクロマウスを知っている人は「まだやっているの?」と驚き、技術の進歩に隔世の感を覚えるといいます。今から参入する人は、上位陣のまるで魔法使いのような、その技術のすごさに追いつけないと感じる方もいます。しかし、入り口はみな同じところから始まっています。
全国大会は11月、これから7月の関西支部大会を皮切りに地方大会シーズンを迎えます。興味のある方はぜひ見に行ってください。
さて、A.I. Future Meetingですから、この後どう発展していくのかという話をしたいとおもいます。
技術の発展は、技術史という観点から予測をしていきます。
ロボットに関連する技術の進歩の参考になるものとして、飛行機や計算機をとりあげてみましょう。
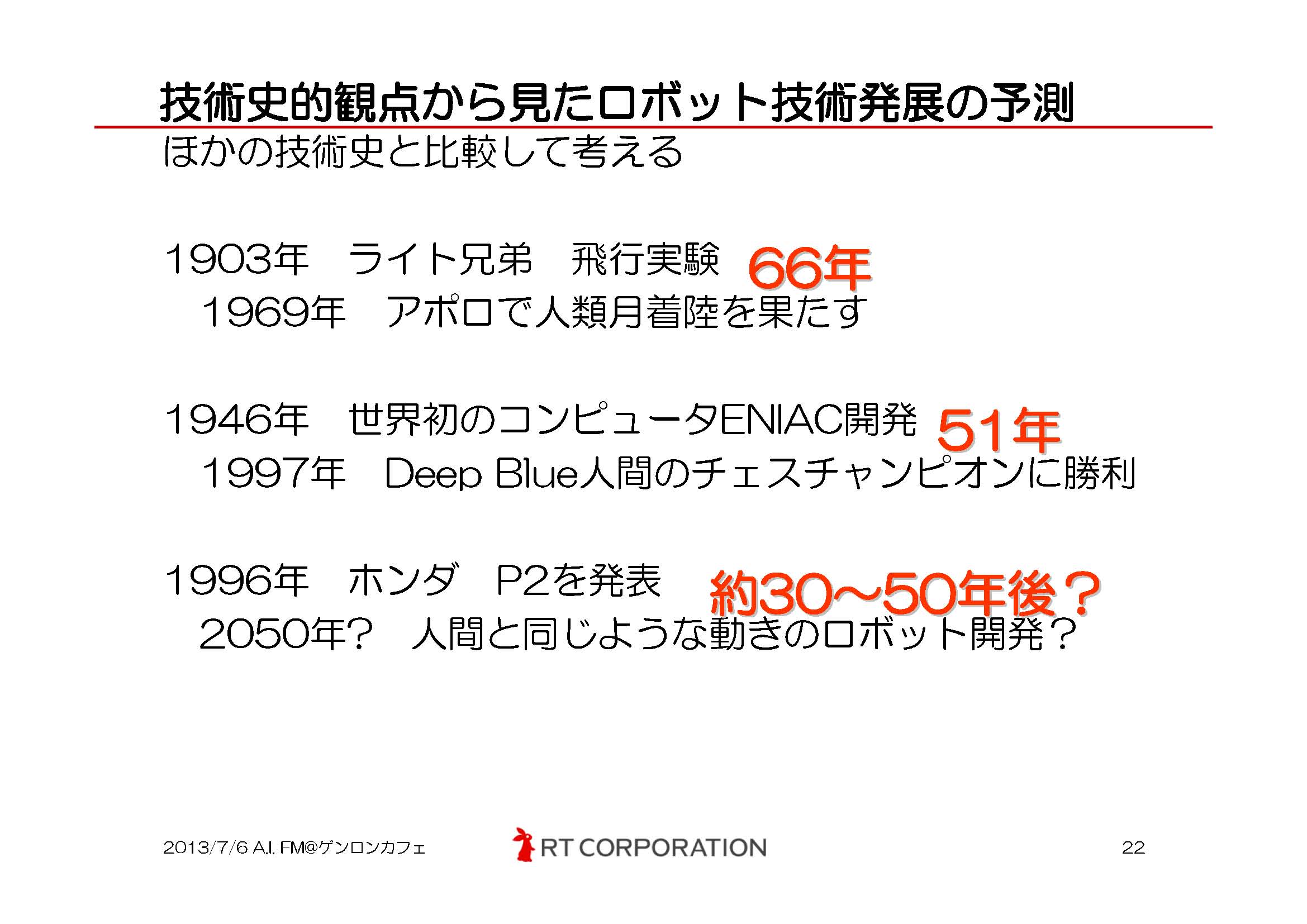
飛行機はライト兄弟によって飛行実験が成功した1903年からアポロで人類が月に降り立つ1969年まで66年かかっています。ジェットとロケットでは多少技術は違うものの、飛翔体という意味では同じような技術分野です。ライト兄弟の時にはほぼ300点程度だった部品数は、現代のジャンボジェットでは300万点という膨大な部品数で成り立つまでになりました。
そして、コンピュータのほうはENIACが誕生した1946年からDeep Blueというスーパーコンピュータがチェスのチャンピオンに勝つまでの1997年で51年かかっています。その間のCPU、メモリ、ソフトウェアの進化は皆様ご存知のとおりです。
これまでの歴史の紹介でも出てきたように、アポロが飛ぶ1969年までにこの計算機の登場が、技術の進歩に大きく貢献したといわれています。
そして、ロボットは、1960年代から盛んに産業用が作られ、今日に至っています。サービスロボット、とりわけ二足歩行ロボットは1996年にホンダがP2を発表していますので、そこから起算して、ロボットの進化は人工知能やコンピュータの支援を得て、30-50年で実現されるといわれています。
SNSやバーチャルなインターネットだけでなく、人工知能は仮想世界から、リアルな実世界へ飛び出してこようとしています。
時間が足りなくて、未来のお話までなかなか飛べませんでしたが、SFや人間が期待した世界は自分達エンジニアが夢見て、そして、実現するものです。
ロボットのいる未来、アールティと一緒に実現してみませんか?
社会人向けのマイクロマウスハッカソンも開催します。
合わせてご検討ください。
 迷路 |
 柱 柱 |
 壁 壁 |