いよいよ今週末よりマイクロマウスがシーズンインします。
関西支部大会はうちの新人松崎のデビュー戦でもありますので皆さん応援してあげてください、本人相当緊張しております。
私はたぶん東日本支部大会に参加予定です。
参加するマウスがまだ用意できてないんですけどね…(焦)
そこはまぁなんとかするであろうということで、今回も2足ネタで行きます。過去ログはこちらを参照してみてください。
前回までで組立、サーボID設定、RPUの初期化まで済んでいるので、今回はPCの側の設定を行います。
前回ダウンロードした「G-ROBOTS GR-001統合版CD-ROM」からモーションエディター(RPU-11ME)Ver1.2.1.2をインストールします。
ここから
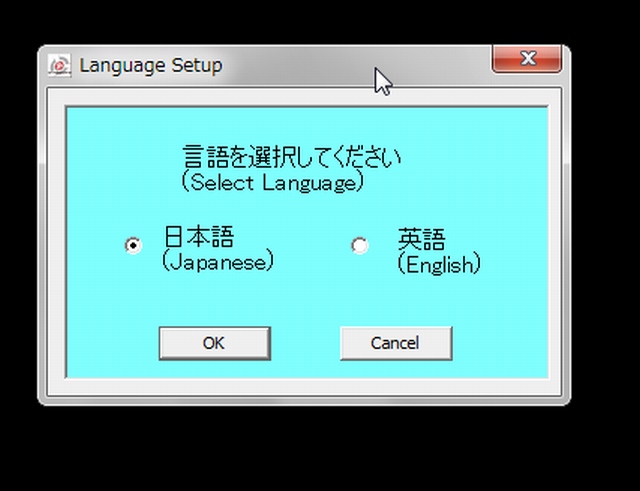
ここを選んで、指示に従ってインストールしていきます。

起動するとこんな画面が表示されます。
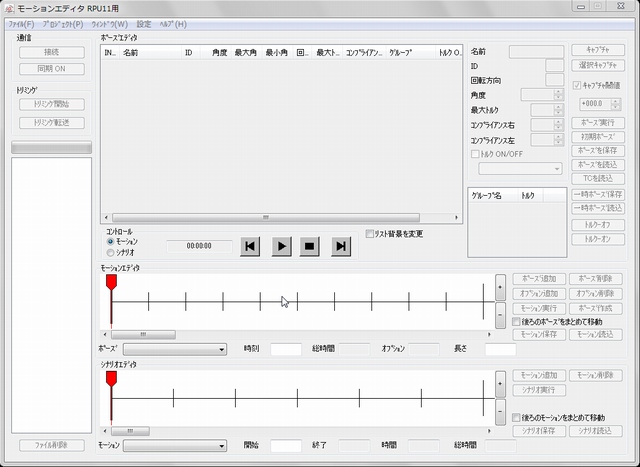
これがメイン画面になります。
File→プロジェクト新規作成を選びプロジェクトを作成します。
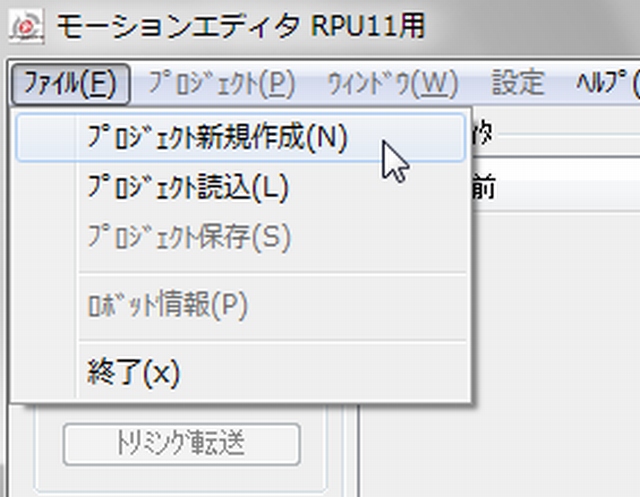
データパスはどこにプロジェクトファイルを置くかの指定ですのでお好みのフォルダを指定してOKです。
プロジェクト名もお好きな名前でだいじょうぶです。今回は【RIC30_blog】で作成しています。
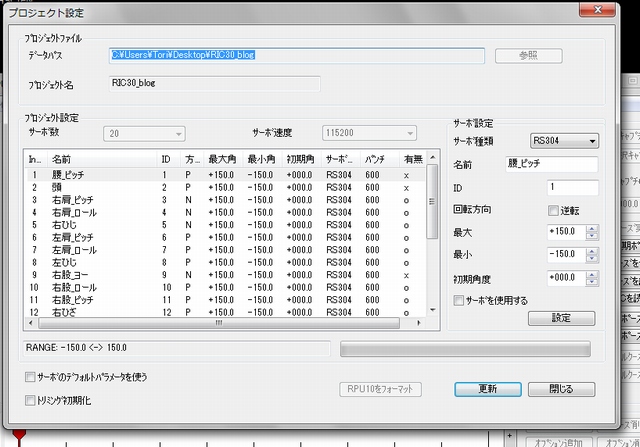
サーボ数はRIC30では16個使用していますが、ここでの設定では20個で設定していきます、今後の拡張を見据えた設定です。
Indexの番号あたりをクリックするとサーボの設定や名称を変更できるようになります。ただここでIDを書き換えてもサーボ自体のIDをが書き換えられるわけではありませんのでご注意を。書き換えは「MemoryMapEditor」を使いましょう。
変更できる項目は
- サーボ種類
- 名前
- 回転方向
- 最大角
- 最小角
- 初期角度
- サーボを使用する
最大角、最小角は原点から右回転、左回転どこまで動かすか? という設定になります。
で、Ric30での設定になるのですが、ID1,2,9,15の設定項目【サーボを使用する】のチェックを外してしまいます、今回使用しません。
そしてチェックを外したりパラメータを変更したら必ず【設定】ボタンを押すのを忘れずクリックします。これを押さないと設定に反映されません。
そして「サーボの種類」はすべてRS304を選択して16個全部設定していきます。1つずつ設定です、【設定】ボタンを忘れないように。
全部終わったら【更新】を押して閉じます。
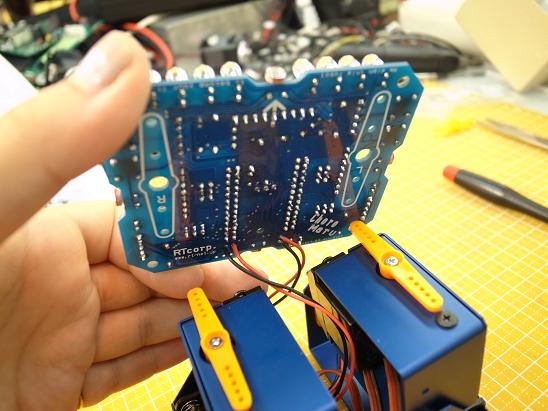
さ、いよいよロボットと接続します。

このようにポーズエディタに先ほど設定したサーボ情報が反映されているはずです。
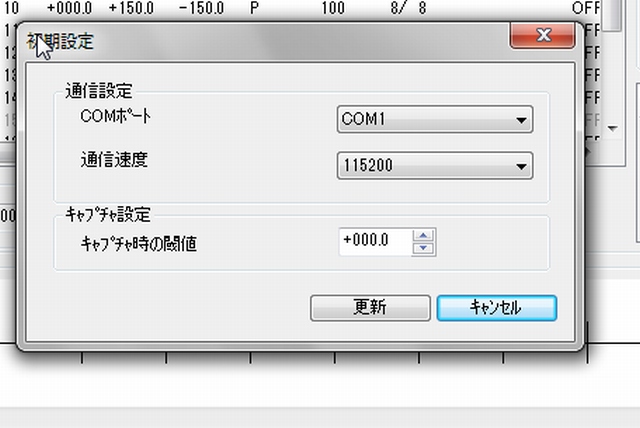
PCとロボットを接続するためRS232C通信ケーブルでRPUとPCを接続します。この時に今一度デバイスマネージャーからCOMポートの番号を確認しておきます。(私のは1番なのでここではCOM1で進めていきます。)
設定→環境設定を選びCOMポートを設定し、更新を押して反映させます。
では、ロボットの電源を投入します。「ぷ~、ぷぴ~~~~~~、ぷぴっ♪」という聞き慣れた音が流れたら起動完了。
モーションエディターの【接続】ボタンを押して接続を確立します。
 }
}この画面が出たときはCOMポートの設定が間違っている場合が殆どです。落ち着いてCOMポートの設定をし直しましょう。
接続中で下のような画面が出てきますが…
気にせずOKを押してしまいましょう。
そしてまもなく接続が完了します。
ではRPUをこのプロジェクトで使えるようにしてしまいましょう。
先程サーボ情報を設定したとこと同じ画面を出します。 今回は プロジェクト→プロジェクト設定から呼び出します。
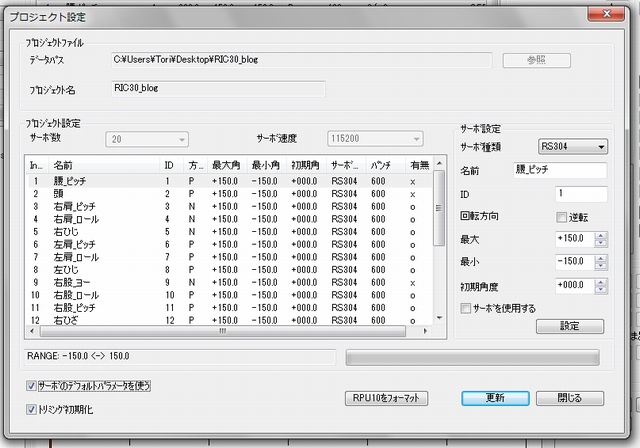
【サーボのデフォルトパラメータを使用する】と【トリミング初期化】にチェックを入れて【RPU10をフォーマット】を押します。
ちょっと時間かかりますが気長に待ちます。 焦って電源を切ったりケーブル抜いたりするとRPUが再起不能になりますのでお気をつけて。
そして完了。
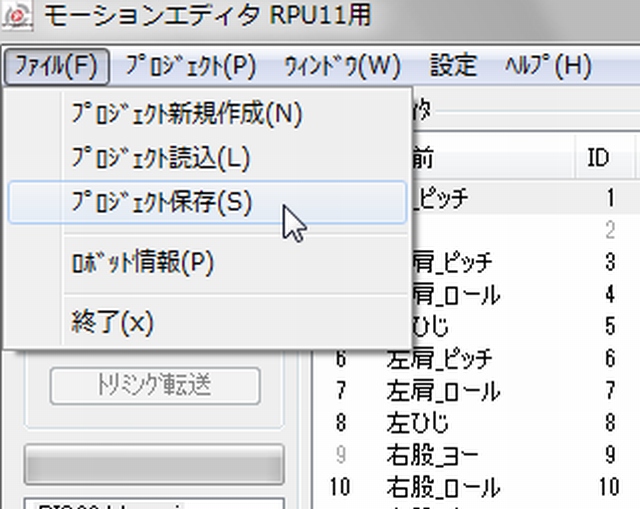
このあたりでプロジェクトを保存しておきましょう。たぶん警告されてるころでしょうし。
ファイル→プロジェクト保存でファイルネームを付けて保存しておきます。保存場所は最初にデータパスで指定した場所に保存されます。
どんどん行きます。
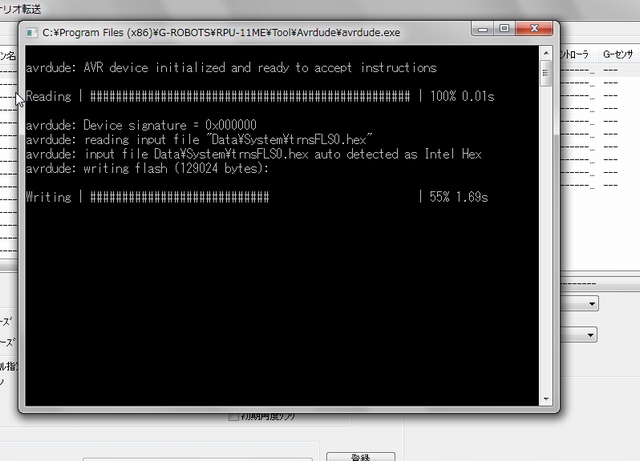
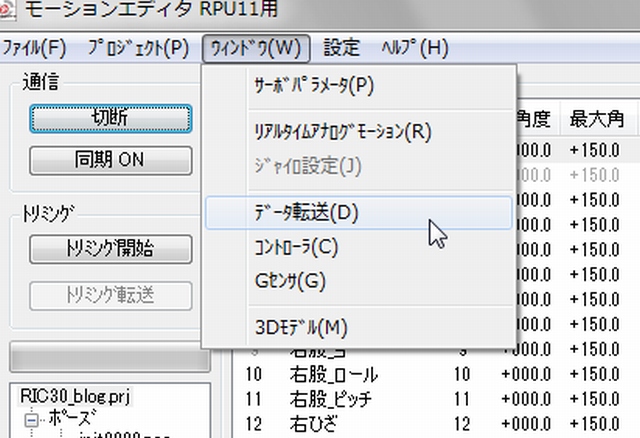
続いてRPUにこの情報を書き込みます。 ウィンドウ→データ転送を選びます。
モーション&シナリオ転送 という画面が呼び出されますので左下の【転送】を押します。
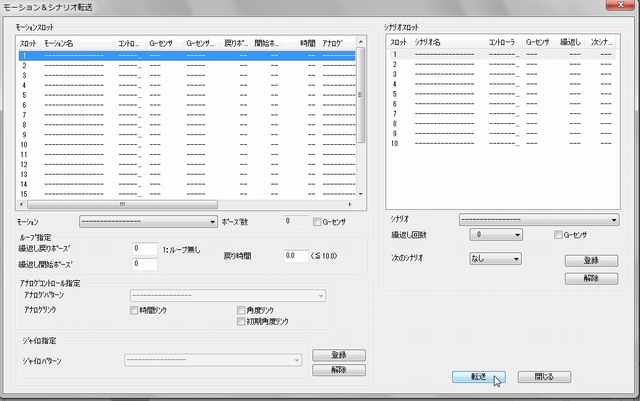
この時になんらかのエラーが発生するときがあるようですが、どうも使用しているPCを側の環境で発生するようです。
回避方法として、PCを側のUAC(ユーザーエージェントコントロール)の設定をOFFにして再起動することで問題は解決するようです。
問題がなければグングンとパーセンテージが伸びていき完了します。

完了すると「ぷ~、ぷぴ~~~~~~、ぷぴっ♪」っという聞き慣れた音とともにロボットに力がみなぎっていくのがわかってきます。
ここまで出来たらすべての準備が完了。 いよいよトリム調整してモーションの作成です! 長かった~~~~~~!
ということで次回はいよいよ実機を使ってのモーション作成に入ります。 さてどんなモーションやろうかなっと…
 G-ROBOTS RPU-11 |
 RIC30 |
 G-ROBOTS GR-001 (RS303MR・ RS304MDサーボ仕様) |