と゛ て゛ も゛ あ゛ つ゛ い゛
冒頭からすいません 炎天下1万歩ちょい歩いて軽くグロッキー気味のSEIJIです、休憩と水分はきっちり取りましょう >ALL。
ちょっとクールダウンして落ち着いたので前回からの続きで、いよいよロボット本体を動かしていきます。
過去ログはこちらからどうぞ。
ではロボットの電源を入れてみましょう。
徐々に直立っぽくモーターが動いていくはずです。(ここまでが前回)
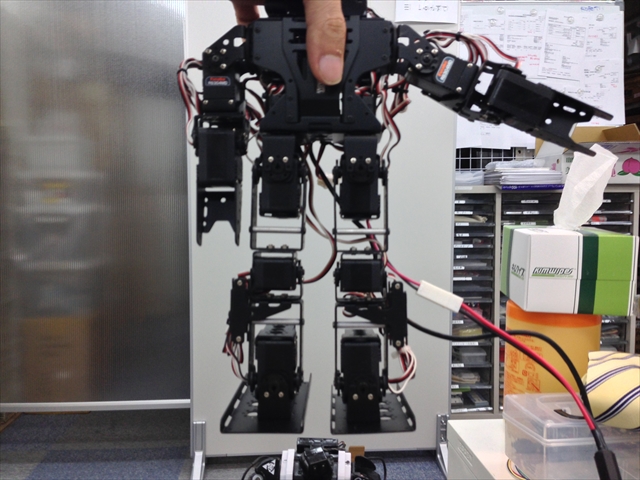
さて、ロボットを立たせてみましょう きっとすごい違和感を感じるでしょう。
そう、まっすぐになってないのでとても落ち着かない。
だからまっすぐに矯正してあげましょう。
ということで、今回の本編トリム調整です。
サーボ個体の誤差、組み付け時のズレ等で本来なら問題なくまっすぐになるはずのものがなっていない。
ですので、サーボ1個ずつに「お前はこのくらいズレているんだよ」と教えてあげるのがトリム調整です。
まずPCとロボットに搭載されているRPUをRS232Cケーブルで接続し、モーションエディターからプロジェクトを読み込ませて【接続】ボタンを押して接続を確立しましょう。ここまでは前回やってたよね?
ではトリム調整の開始、まず【トリミング開始】ボタンを押します。
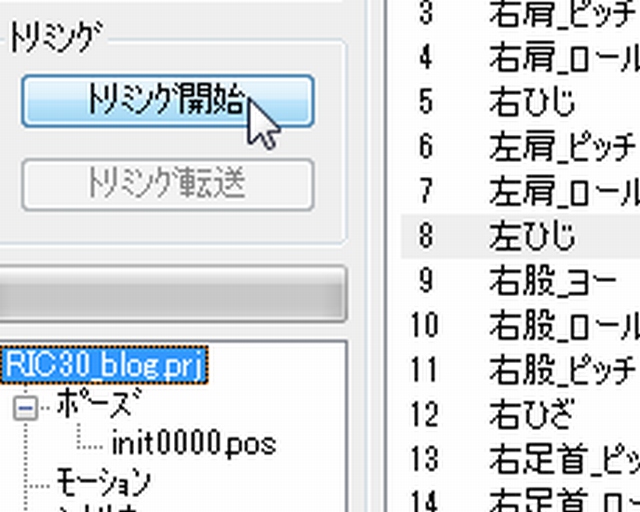
トリムを調整する際に定規を当てたり、治具を用意して行う方法がありますが、今回はぱっと見で行う方法で行なっていきます。現地で調整が必要になった時とかに重宝しますよ。
基本的に全部のラインは直線、直角になるように組んでいますので、それを意識して各部のサーボを調整していきます。
私の癖で進めていきますので、まずは左足から調整していきます。
見た感じ膝が若干逆関節気味になっているので、まずはそこから調整してしまいます。
左膝のIDは18なので、まずはこれを選んで
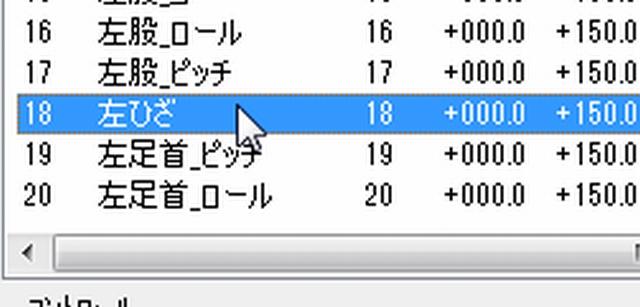
ほら、真っ直ぐになった(マイナス方向に動かしました)
今度はつま先が下がっているのでID19調整します。ここも直角にしてしまいます。
ついでに足のつけ根もID17を調整して胴体からまっすぐ伸びるような感じに調整します。
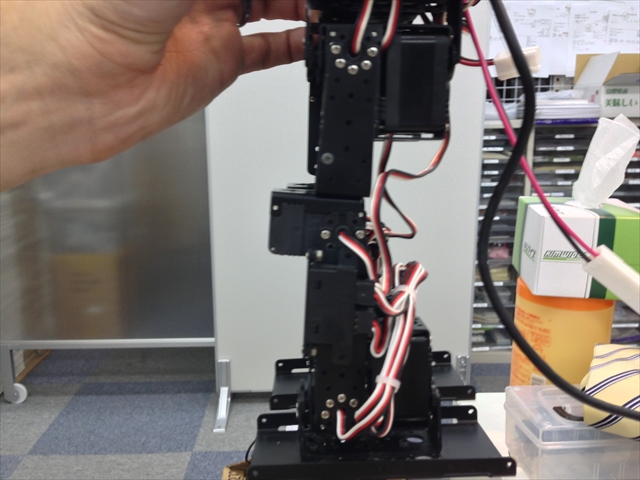
ざっと行った感じがこれ。
真っ直ぐかどうかの判断ですが、周りにある真っ直ぐな背景に照らし合わせてアタリを取っています。
柱とかラック、カーペットの目とか周囲にいっぱいあるので、これらに合わせてみればだいたいのまっすぐは出ます。
左足の調整がだいたい終わると右足とのズレがわかりやすくなるので、今度は左足を基準に右足を調整していきます。
左右が揃えば重ねて見た時にはみ出たりしなくなるので、これでだいたいピッチ方向はOKです。
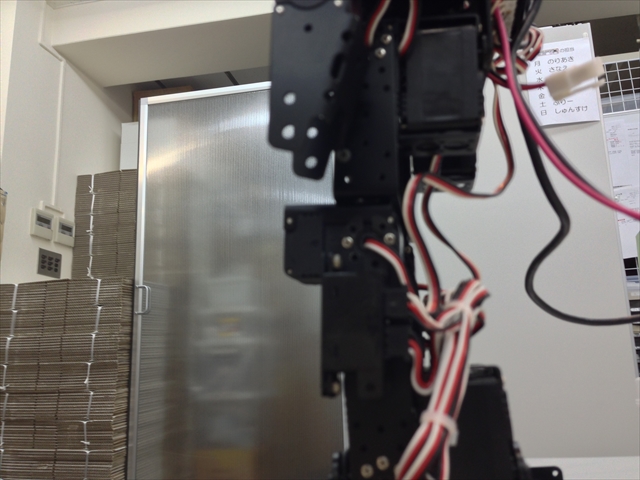
続いてロール方向を調整します、やっぱり片足を腰からまっすぐ降りてくるようトリムを調整し、反対の足を並行になるように調整していきます。
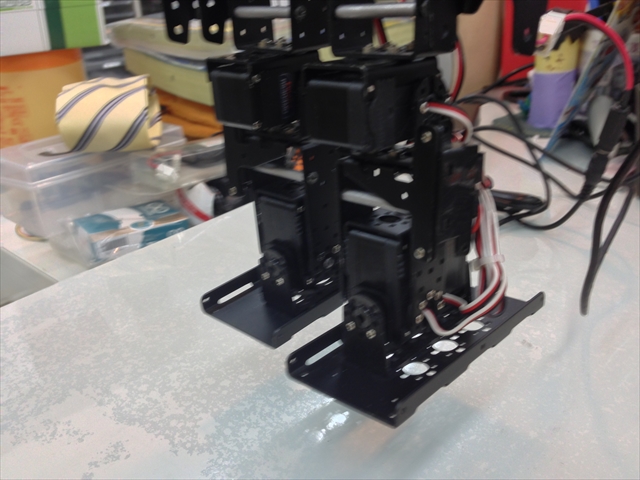
これが現状 大体合ってるかな?
足の内側にサーボホーン取り付けネジの頭があるのですが、ここが左右同じ位置で左右の感覚が同じになればほぼ揃っています。
揃ったら最後に足首ピッチを揃えて下半身は完成。
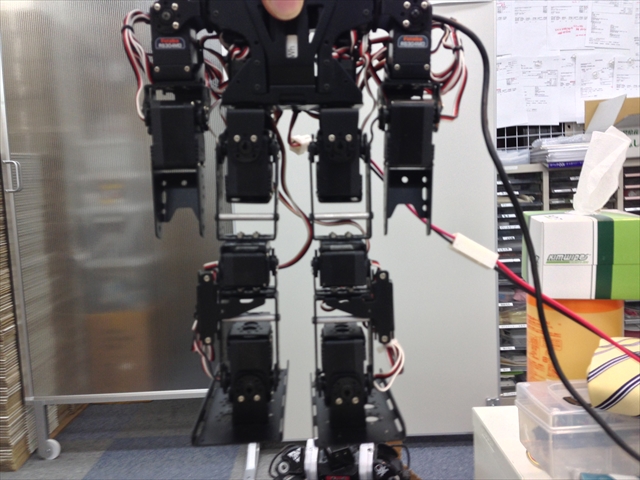
調整後 凛々しい立ち姿になりました。ざっくりと直立は出たので、ここからは微調整あるのみ。
どこまで追い込むかは製作者次第です、どこまで問い詰めてもキリがないのがトリミング調整です。求道者ですもはや。
小型ロボなら15cm程度の定規と三角定規セットがあれば大概間に合います あとずとロボを持っている体力と腕力、最近これが足りなくていけないです。

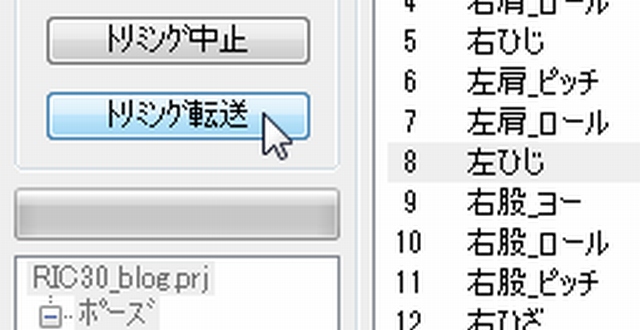
ここまで出来たらトリミング情報を転送します。
【トリミング転送】を押して情報を転送します。完了したら【トリミング中止】を押して完了です。

ついでにファイルにも保存しておきましょう。プロジェクト→トリミングデータ保存で保存出来ます。ファイルネームは適当で。
いやぁ、ここまで長かった まじ長かった 一ヶ月かかってますね(実際には1日でここまで出来ると思われ)
次回いよいよモーション作成に入っていきます。
踊らせるもよし、歩行モーションでもよし(長くなりそう…)
飛び込みネタが無ければモーションやりますので。 じゃあまたっ!
 G-ROBOTS RPU-11 |
 RIC30 |
 G-ROBOTS GR-001 (RS303MR・ RS304MDサーボ仕様) |