これはいいなーと思ったので、ちょっと工作してみたくなりました。
小型協調ロボットを大量に作るのによさそう。
製作レポートを連載しようかな。
TOCOSさんのホームページで、TWE-Lite DIP使用方法(初級編)というページがありますので、
それに沿ってやってみたいと思います。
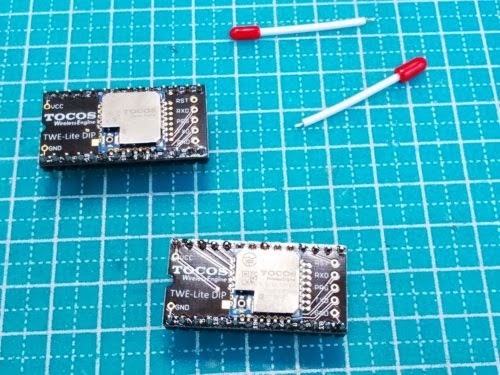
通信には、モジュールをペアで購入します。半田付けできる人は、「無線マイコンTWE-Lite DIP(要組み立て)」がちょっとお得です。
ピンヘッダがついていませんので、1×14ピンが2本(計4本)、別途必要です。丸ピンタイプがすんなり嵌ります。

必要な部品は、
必要な道具は、

まず、ピンヘッダを半田付けします。
マッチ棒型アンテナを立てて、
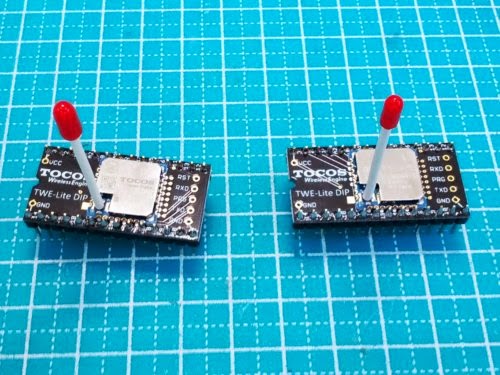
裏から半田付けします。

「TWE-Lite DIP」と電源を、ブレッドボードに指します。
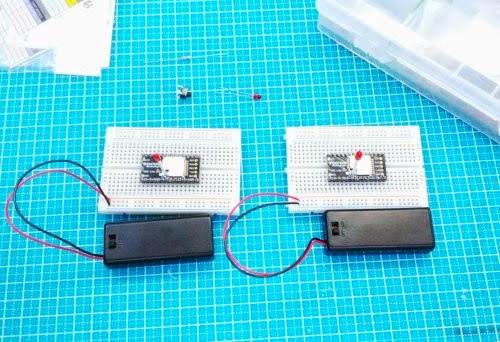
付属されてるピン配置表を見ながら、
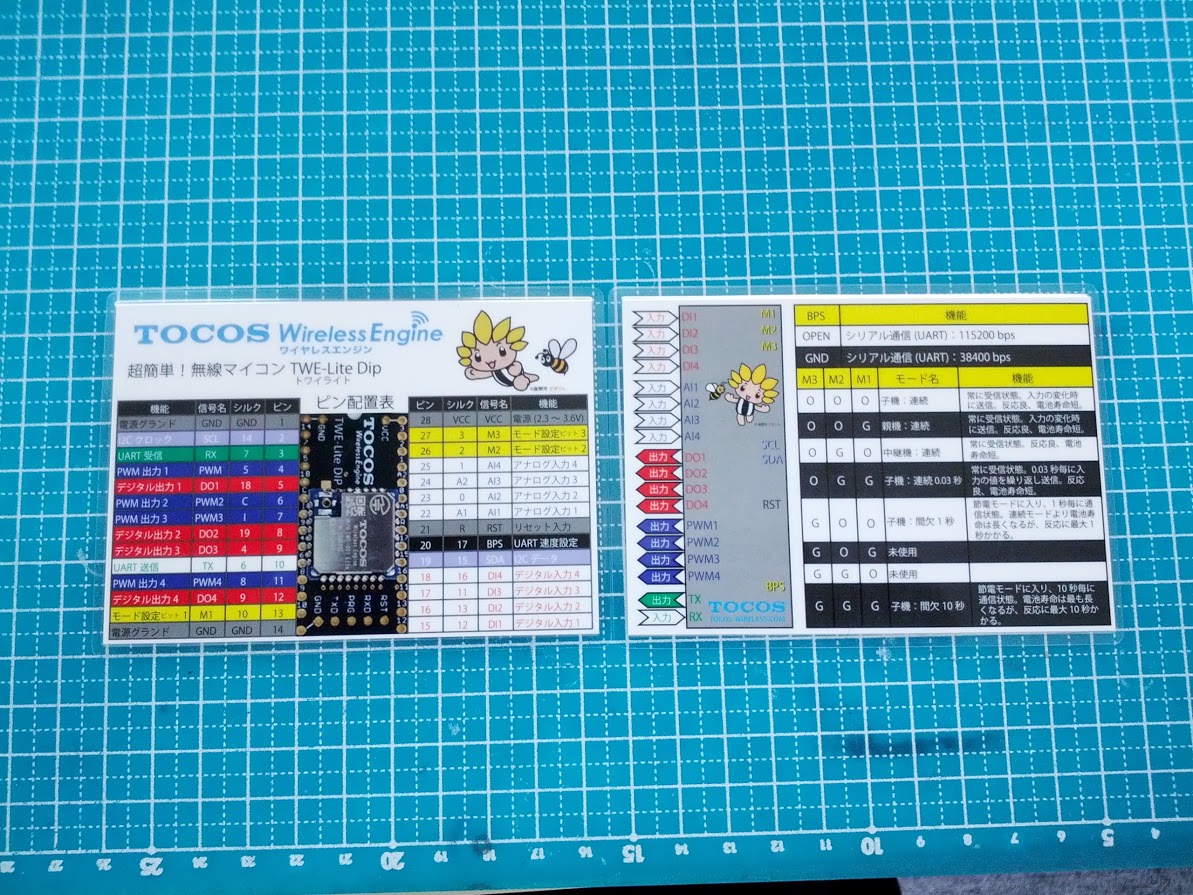
VCCに電源の赤配線、GNDに電源の黒配線。
アナログ入力1~4に電源の赤配線。
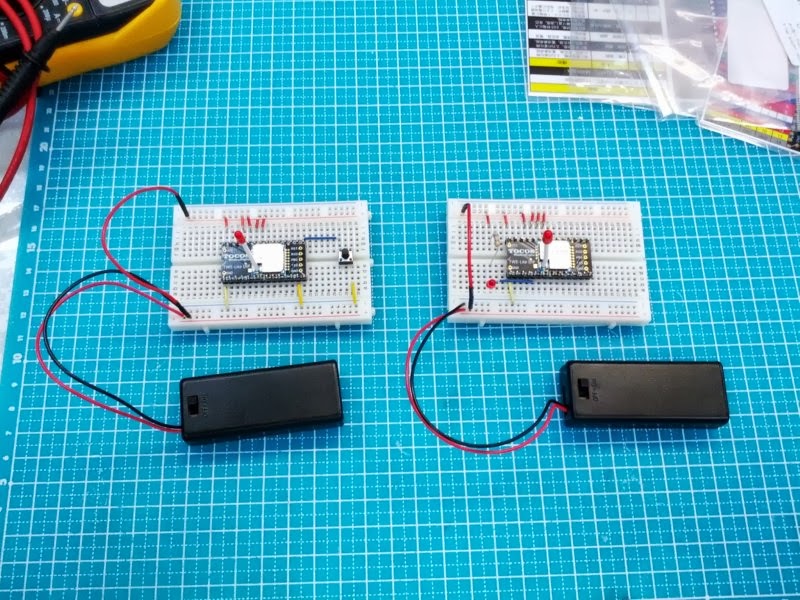
ここまでは、両方の「TWE-Lite DIP」は同じ配線になります。
親機とする「TWE-Lite DIP」に、モード設定1をGNDへ。デジタル入力1をスイッチに接続。スイッチを押すとGNDに接続されるように配線。
子機とする「TWE-Lite DIP」に、デジタル出力1にLED(足が短いほうをTWE-Lite DIPに接続)を抵抗680Ωをはさんで電源に接続。
TWE-Lite DIP使用方法(初級編)を見ながらやるほうが、わかりやすいですね。
スイッチを押した様子。サンプルファームウェアは書き込み済みなので、楽チンですね。
マイコンを使うとき、私はレギュレータやDCDCを普通使用するので、乾電池のみで動作させるのは新鮮ですね。
モータと併用するときは、2.5V出力レギュレータを使用すればいいのかしら。
 無線マイコンTWE-Lite DIP(要組み立て) 無線マイコンTWE-Lite DIP(要組み立て) |
 普通のブレッドボード 普通のブレッドボード |
 ブレッドボード・ジャンプワイヤ ブレッドボード・ジャンプワイヤ |
[amazonjs asin=”4339008176″ locale=”JP” title=”C言語によるディジタル無線通信技術”]