
次回に続き、用意ができたので、
ロボットの使用準備と、Choreonoidのダウンロードまでやりたいと思います。
1.ロボット準備
①USB RS232C変換器「USB2DYNAMIXEL」をRS232Cモードに切り替えます(よくやるミス)

②USB RS232C変換器をパソコンのUSBポートに接続します(引っ掛けてパソコンのUSBポートが折れそうなので、延長ケーブルを使用してます)
USB2DYNAMIXELだと、LEDが赤く光って、通電を知らせてくれます。

パソコンがインターネットに繋がっていれば、ドライバは自動インストールです。時間は2~3分くらいでしょうか。
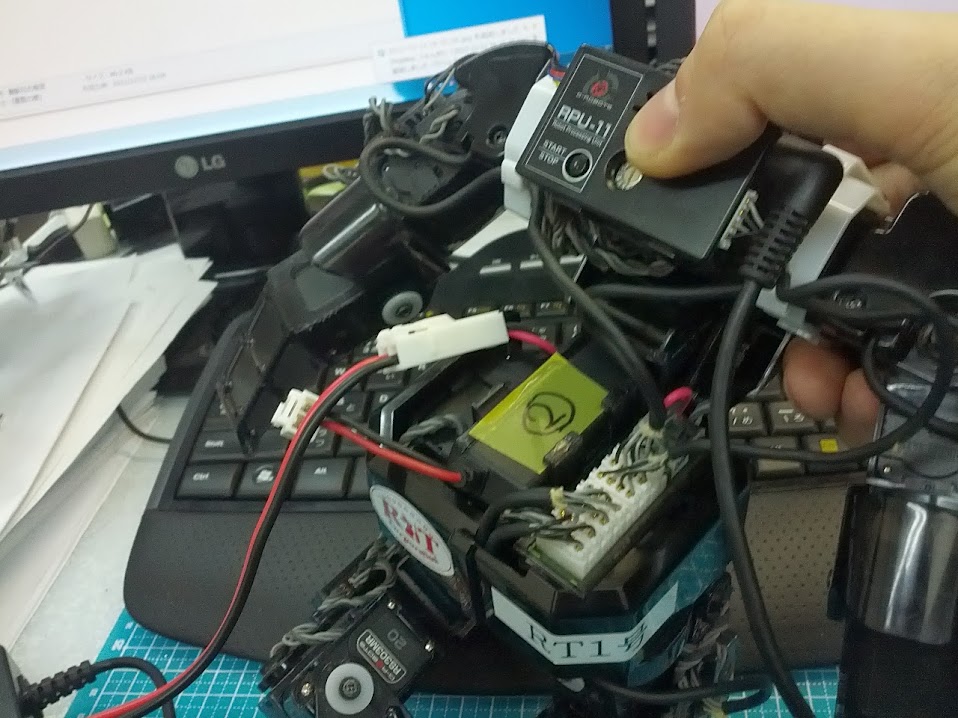
③GR-001の背中に付いているコントローラ「RPU-11」のモードを「0」に切り替える(矢印の方向を0に合わせる)

④「RPU-11」にG-ROBOTS 通信ケーブル(RS232C)のジャックを差し込む(通信ケーブルはGR-001のキットに付属しています)

⑤GR-001の電源コネクタに、安定化電源のコネクタを差し込みます。
(このとき、バッテリは入れっぱなしにしておきます。バッテリがない状態で動作を作ると、電源をバッテリに変えた時、重量バランスが崩れるので、きちんと動きません)
準備はこれで完了です。
動かせるようになるまで、まだ時間がかかるので、GR-001の電源スイッチはOFFのままにします。
2.ダウンロード
①Choreonoidのダウンロードサイトに行きます。
http://choreonoid.org/ja/download.html
②「Choreinoid-1.3.0-win32.exe」をクリックします。
ダウンロードが始まるので、しばらく待ちます(数秒で終わる)
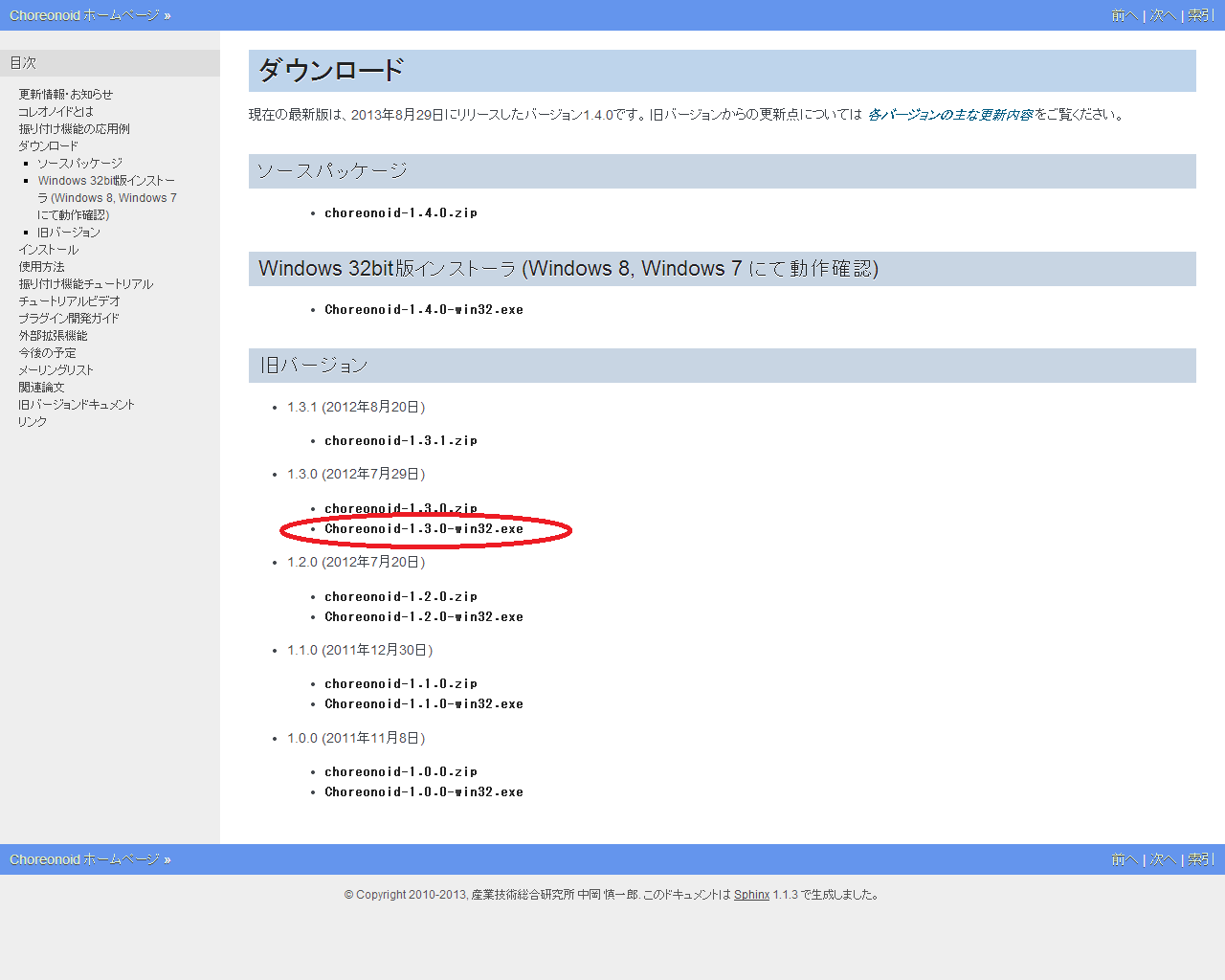
注意:「Choreinoid-1.4.0-win32.exe」を使用すると、GR-001は正常動作しなかったため、一つ前のバージョンを使用します。
次回のリリースで対応していただけるとのことです。
第3回は、インストールと起動を行います。
イベントのお知らせ
第9回U1Kを開催します。U1Kとは、1キロ以下級人型ロボットの大会のことです。(Under 1Kg)
日時:2014年1月12日(日)13:00~17:30
場所:アールティ秋葉原ショールーム秋葉原の人の多いところ?
参加締切:2014年1月9日23:59

ぜひ、ご参加下さい。
 GR-001 GR-001 |
 USB2DYNAMIXEL USB2DYNAMIXEL |
 JO-ZERO専用外部電源ユニット JO-ZERO専用外部電源ユニット |

