前回は、インストールとソフト起動まででした。
今回は、GR-001のプロジェクト読み込みと接続確認まで行いたいと思います。
5.プロジェクト読み込み
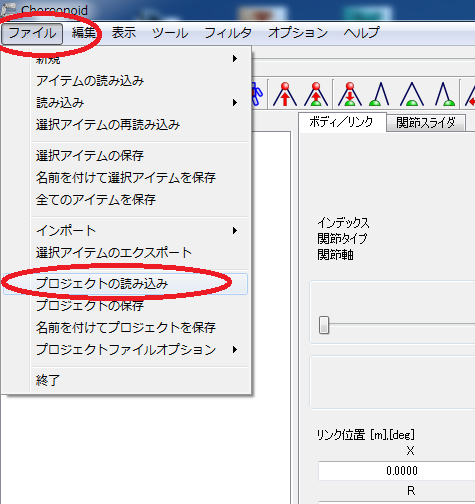
①ファイルメニューをクリックして、プロジェクト読み込みをクリックする
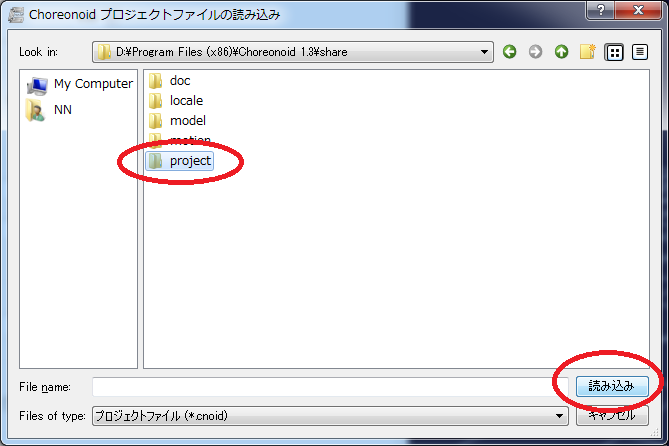
②プロジェクトファイル読み込み画面になったら、「Project」をクリックして、読み込みをクリックする
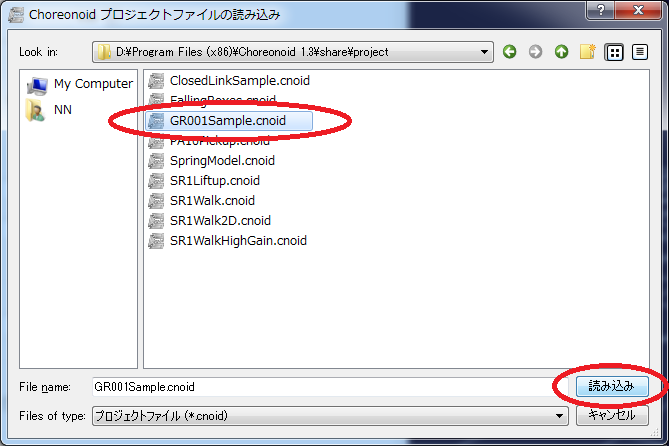
③「GR001Sample.cnoid」をクリックして、読み込みをクリックする。
これで、GR-001を動かすためのプロジェクトファイルを読み込むことが出来ました。

6.接続確認
これから、GR-001を実際に動かしていきます。(GR-001の電源はまだONにしない)
仮想COMポートを使用するので、確認のためにデバイスマネージャを開いていきます。
①スタートメニューをクリックして、プログラムとファイルの検索をクリックします。
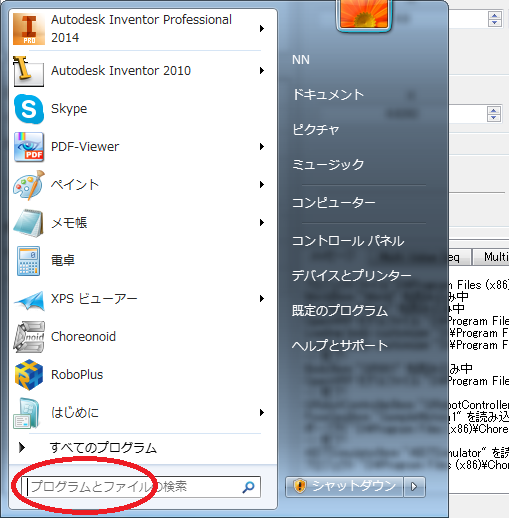
②「dm」と入力すると、「デバイス マネージャー」が検索で出てくるので、「デバイス マネージャー」をクリックします。
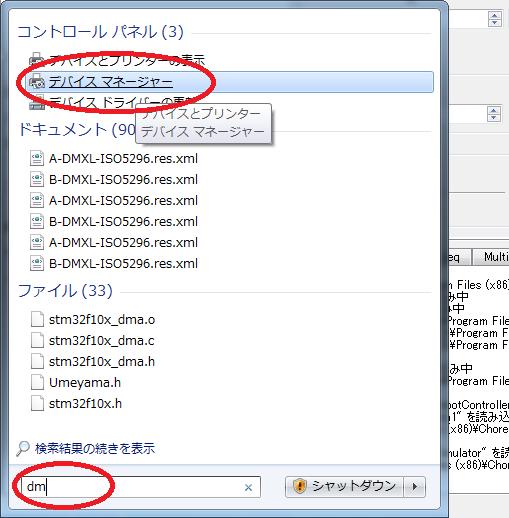
すると、デバイスマネージャが起動します。
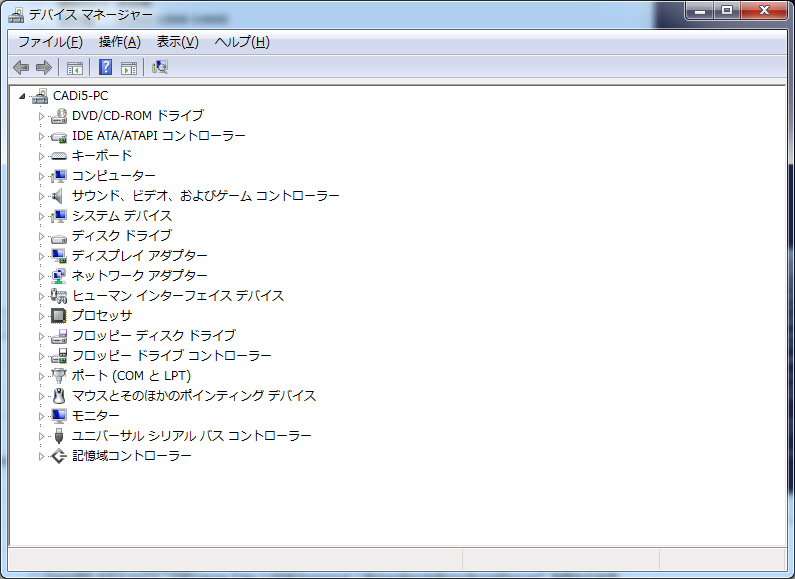
③ポート(COMとLPT)の横にある「▷」をクリックします。
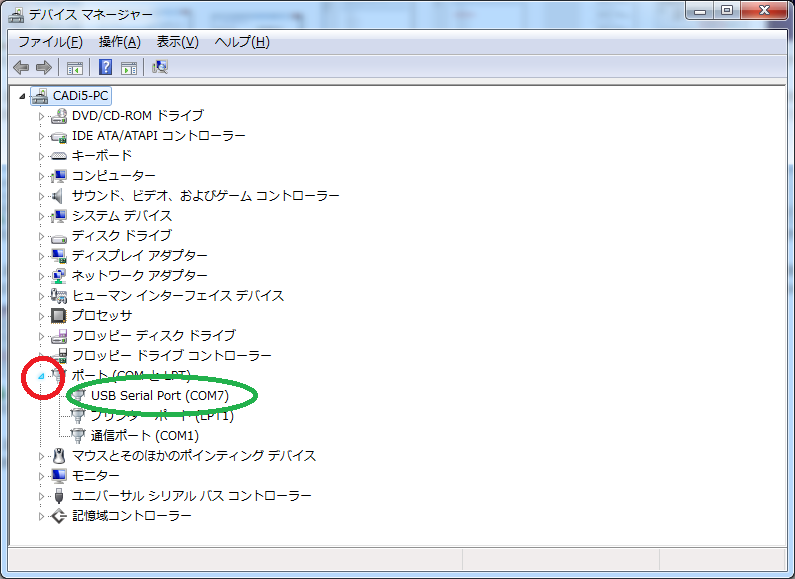
すると、USB Serial Port(COM7)と書かれているのが、確認できます。この「COM7」を覚えておきます。
接続するUSBポートによって番号が違うため、そこは置き換えて下さい。例:COM4やCOM11とか
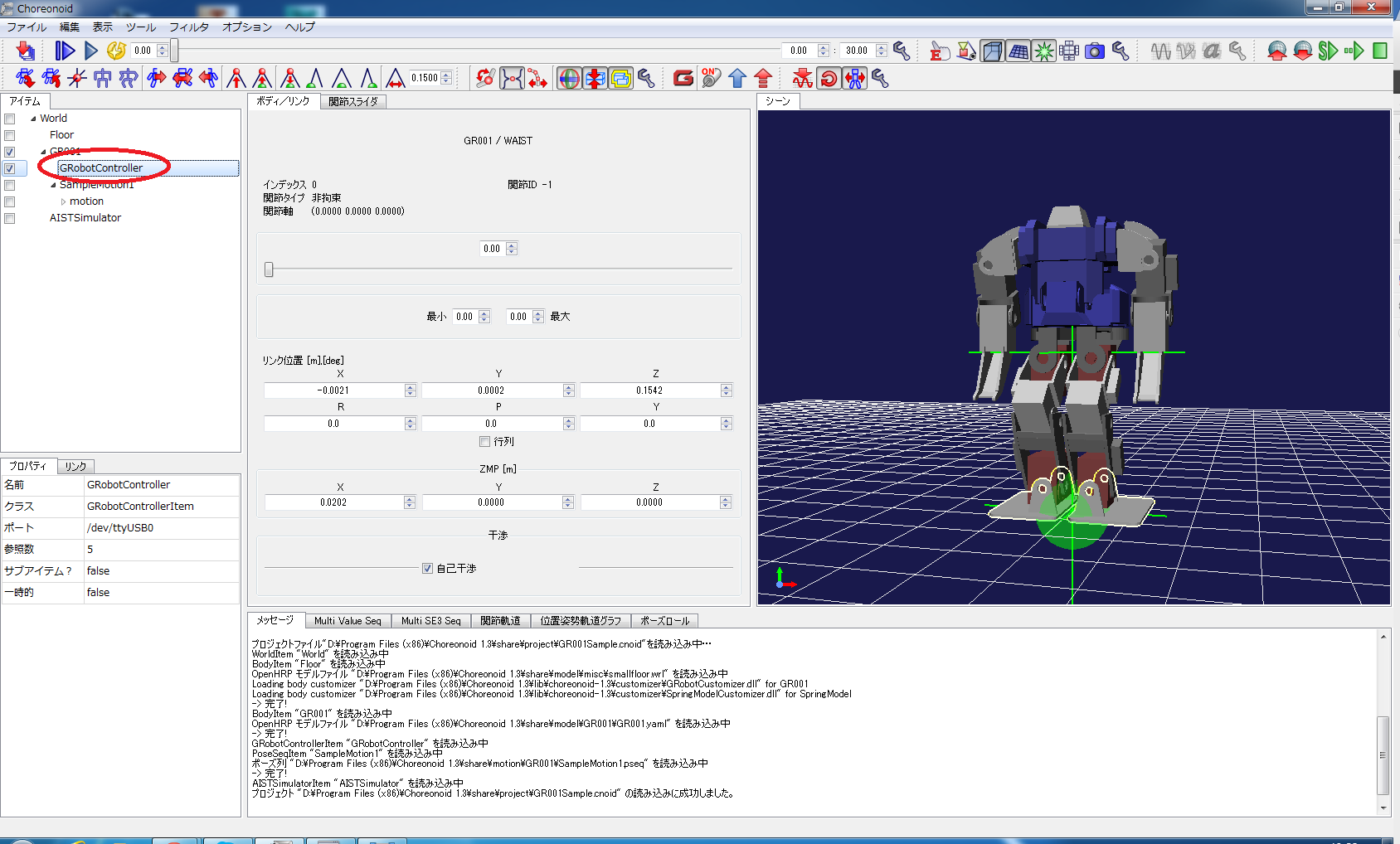
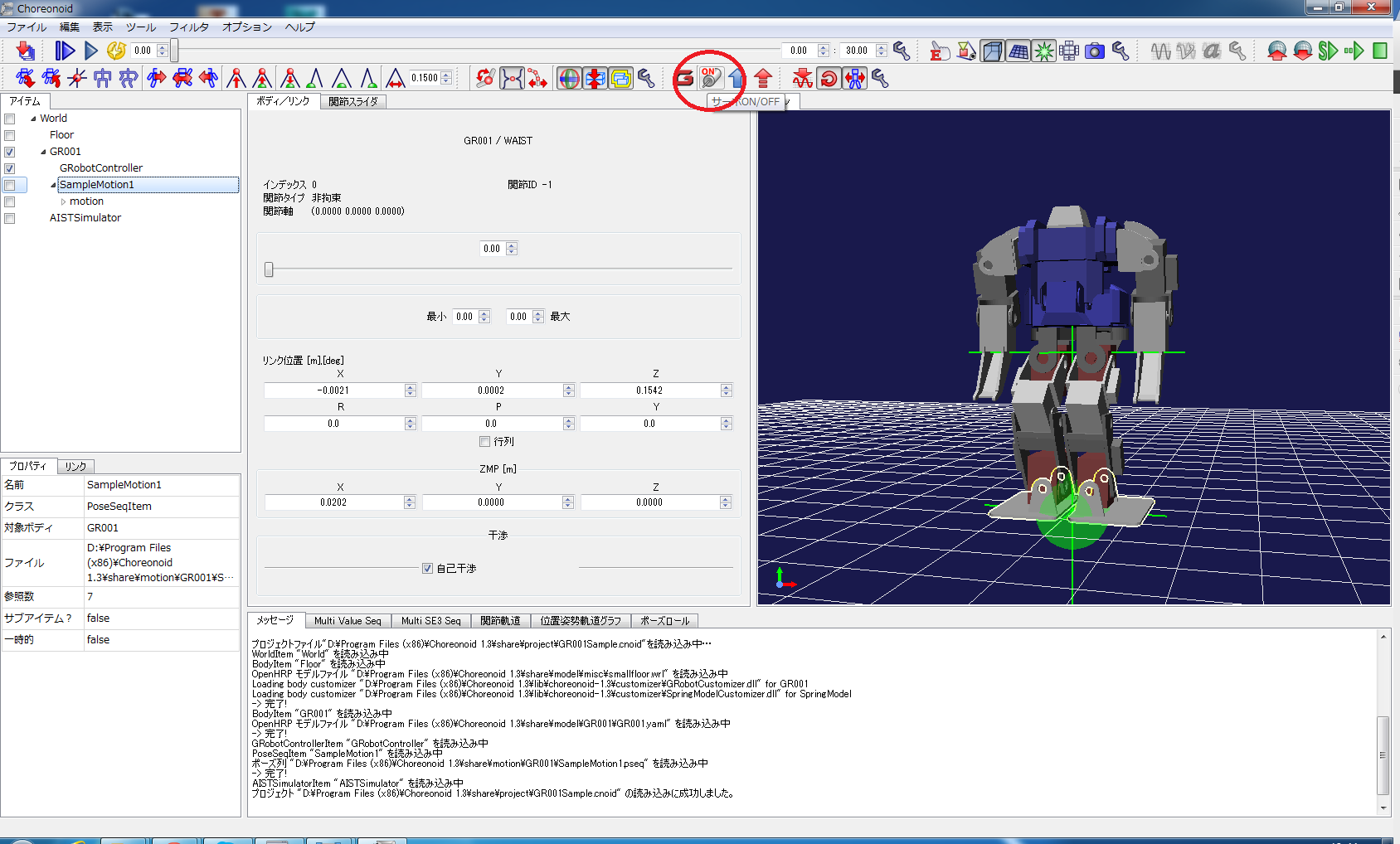
これから、ChoreonoidとGR-001を接続していきます。
④Choreonoid画面に戻って、「GRobotController」をクリックします。
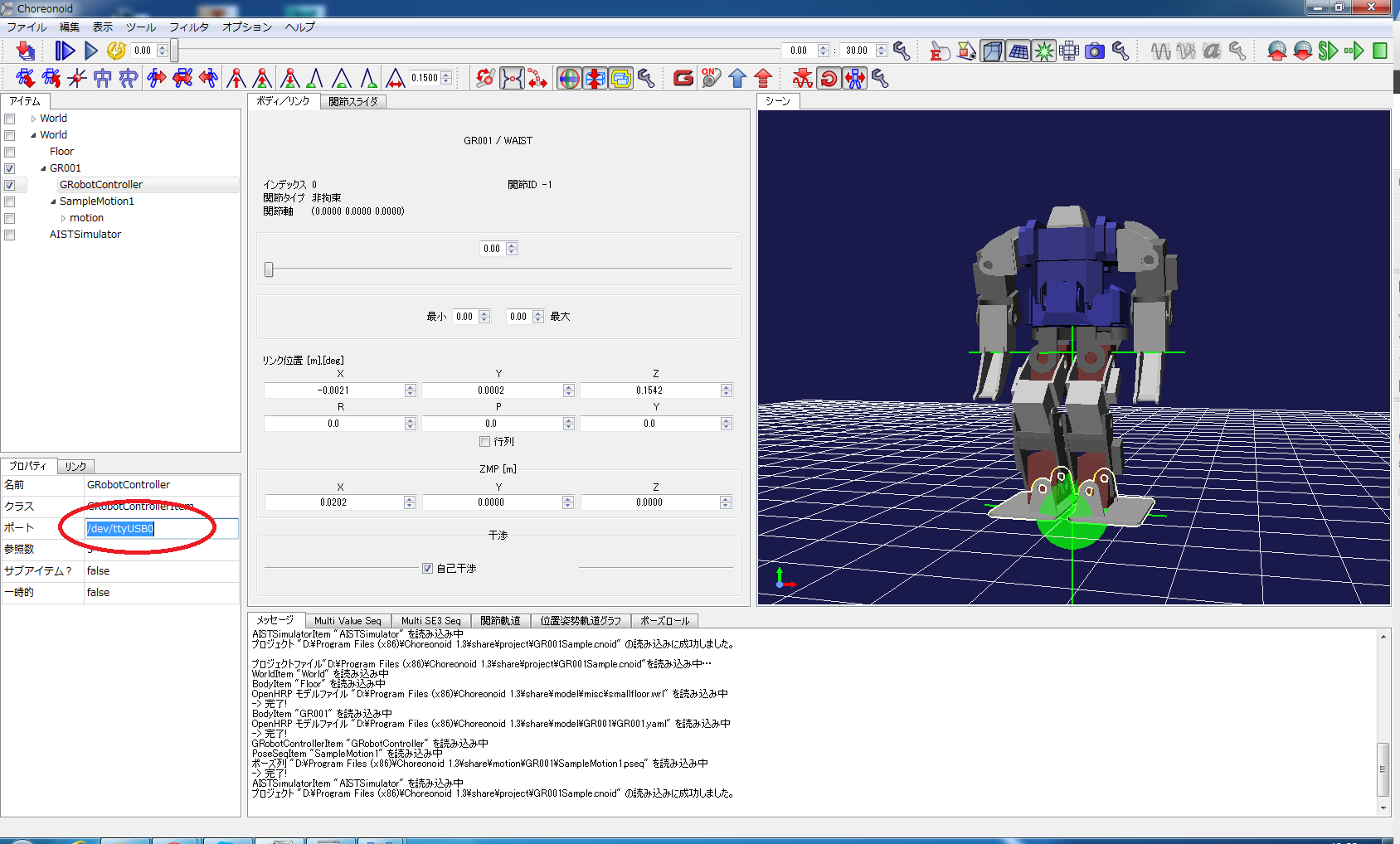
⑤ポートの「/dev/ttyUSB0」をダブルクリックします。
そうすると、中身を書き換えラ得るようになります。
⑥「COM7」と入力して、Enterキーを押します。
適宜、デバイスマネージャで調べたCOM番号に置き換えます。
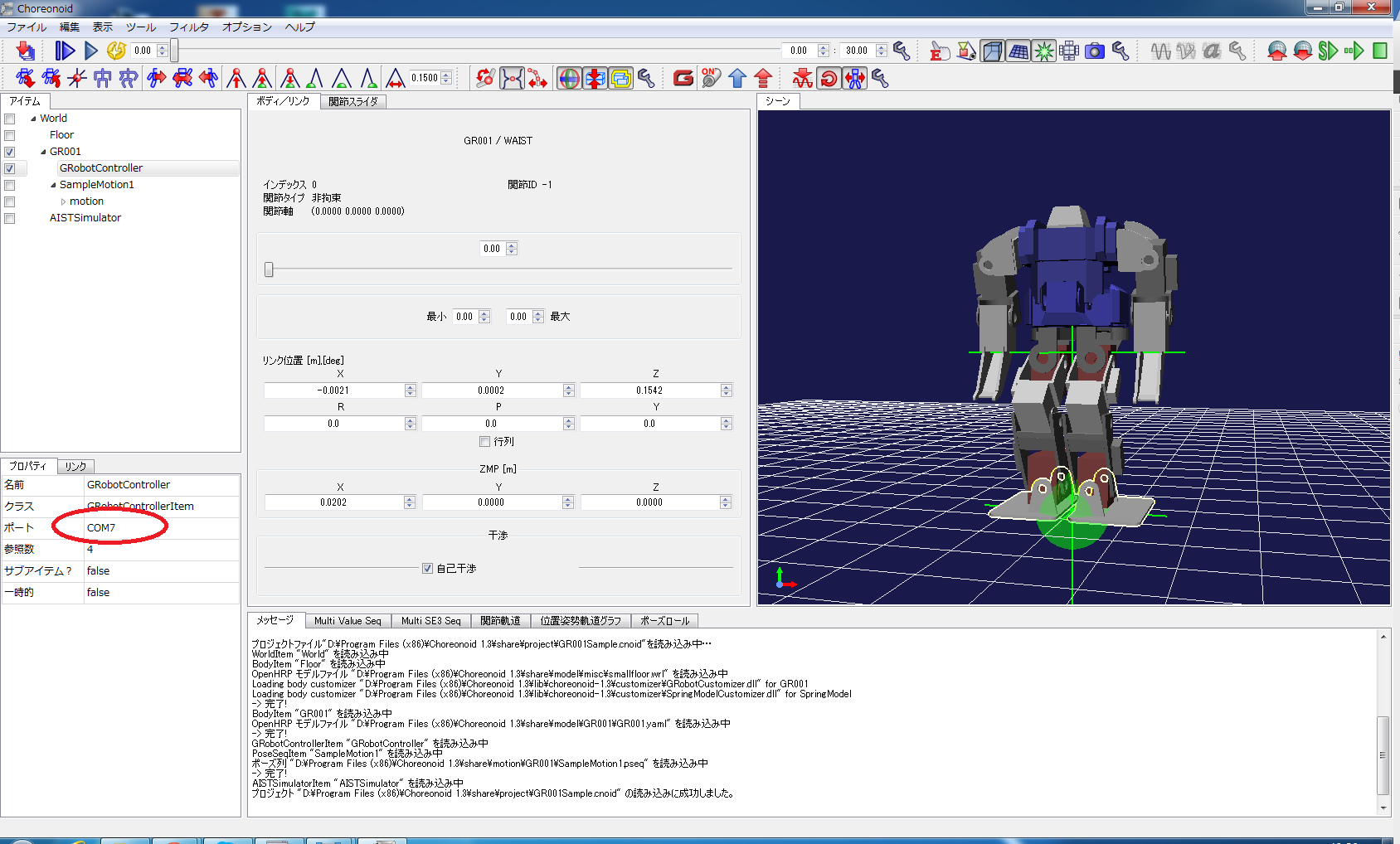
これで、接続設定が終わりましたので、GR-001との接続確認をしていきます。
⑦GR-001の電源をONにする
GR-001が起動するとき、手を挟まないよう気をつけて支えます。
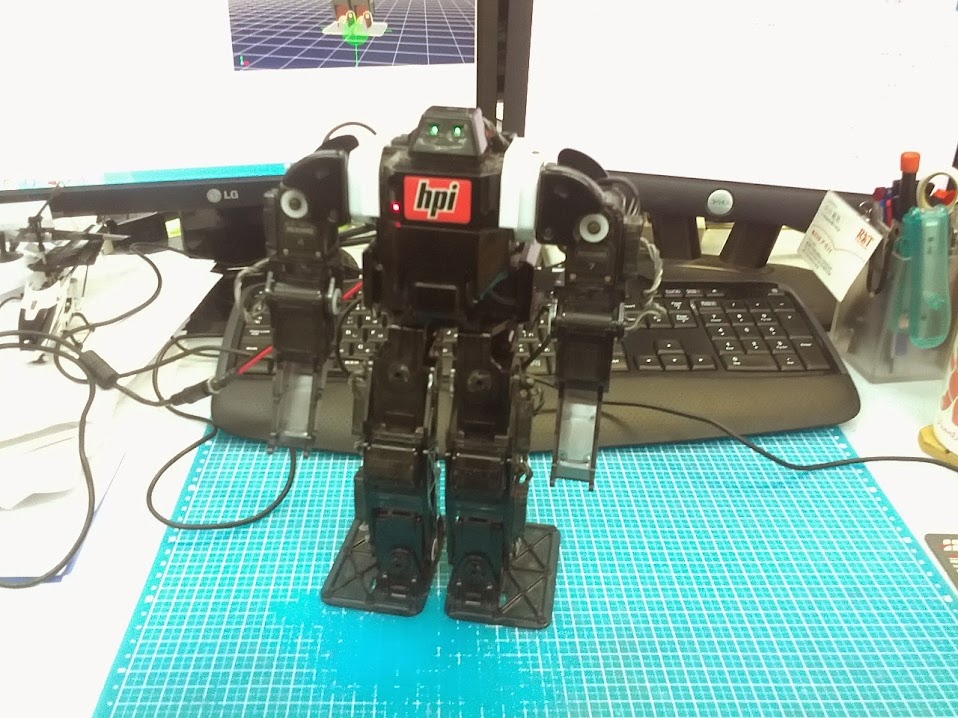
⑧GR-001を手で支えながら、Choreonoid画面に戻って、モータONアイコンを何度かクリックします。
GR-001のサーボモータがフリーになったり、励磁したりと切り替えられます。
これで、接続確認まで出来ました。
次回は、サンプル動作をさせていきます。
イベントのお知らせ
第9回U1Kを開催します。U1Kとは、1キロ以下級人型ロボットの大会のことです。(Under 1Kg)
日時:2014年1月12日(日)13:00~17:30
場所:ベルサール秋葉原 「アキバ大好き!祭り」2F会場
参加締切:2014年1月9日23:59
ぜひ、ご参加下さい。
 GR-001 GR-001 |
 USB2DYNAMIXEL USB2DYNAMIXEL |
 JO-ZERO専用外部電源ユニット JO-ZERO専用外部電源ユニット |

