暖かったり寒かったり暴風雨だったりとめまぐるしく天候が変わる昨今いかがお過ごしでしょうか?
そんななか傘を無くしていることに気づいたSeijiです、泣ける。
Bluetoothドングルを使って簡単に無線化できることで好評なランニングエレクトロニクス製「SBDBT」シリーズ、ヒット商品です。
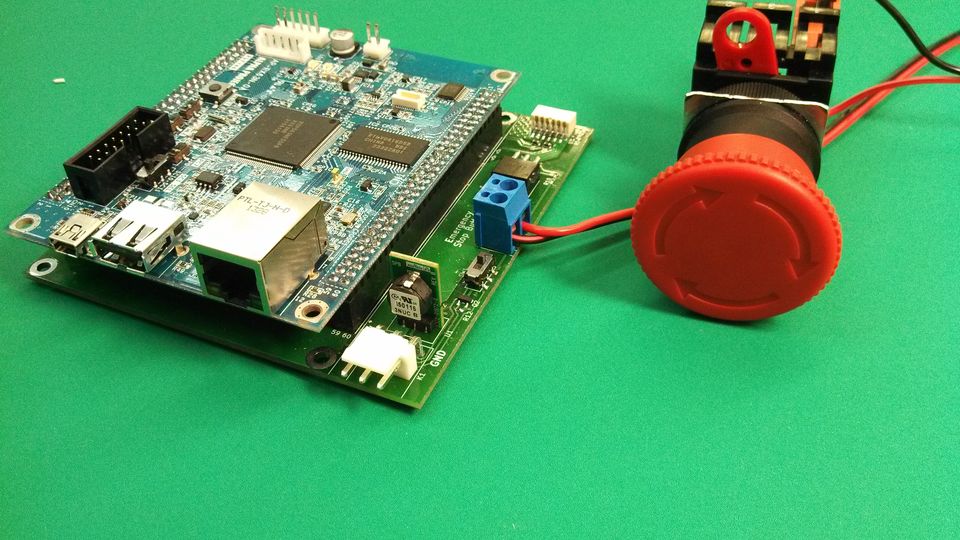
そのシリーズのなかでアールティ企画商品の「SBRCB3BT」、ボードをKHR等のバックパックに取り付けやすいサイズにしたもので、SBDBTなどより取り付けやすいのが特徴となっています。
別売の専用ケーブルとBluetoothドングルをつけたSBRCB3BT
ただ、最近よくある質問で「配布されているPS3用ファームを入れたら動かなくなった」という問い合わせをよくいただくので設定等書いていきます。
現在ランニングエレクトロニクス社にて配布されているファームの最新版はVer.140113ですので、これを編集していきます。
2014年3月14日追記:現在出荷時にはPS3用ファームVer.140113のRCB-3用のものが書き込まれております。
編集するのはglobal.hというファイルで、このあとビルドもするので開発環境にはMicrochip社より配布されているMPLABXを使用します。
基本的にRCB-3用に設定するにはglobal.hだけ触れば大丈夫です。
デフォルトから書き換える必要があるのは下記の赤文字のところです。
・UART_TX_POLARITY 1 (0→1へ変更)
・UART_MINIMUM_INTERVAL 0 (35→0へ変更)
この2行を書き換えることでRCB-3J、HVでゲームパッドから操縦できるようになります。
そして次はRCB-3側も設定を変更します。
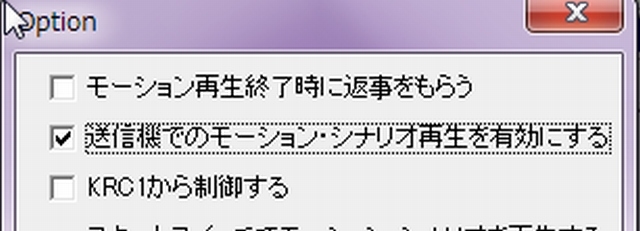
PCと通電しているRCB-3をシリアルUSBアダプタ等で接続し、【設定】ボタン(スパナ)を押します。
そこにある【KRC1から制御する】という項目のチェックを外します(拡張子シリアルで通信を行うため)。
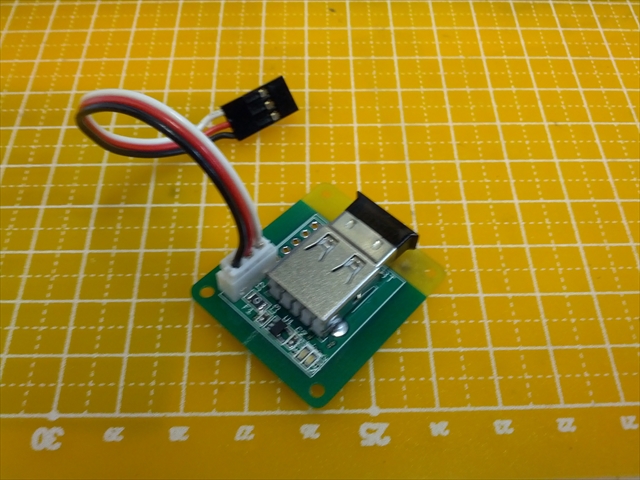
これで設定は完了です。RCB-3の電源を切って「SBRCB3BT」をケーブルを使って拡張シリアルポートに接続します(外側に黒線)。

ケーブルがすごいことに……
コントローラとペアリング済みのBluetoothドングルを挿して電源ON、起動したらコントローラのペアリングボタン(使うコントローラによってやり方が違うのでコントローラの説明書を参照してください)を押すことにより、ペアリングが完了します。
あ、もちろんモーションに無線操縦の割り当てがされていないと操縦できないのでご注意ください。
書き込み方法やRCB-4での使い方などは次回以降に紹介していきます。
普段ゲームで慣れ親しんだコントローラで操縦するロボットはなんかいつもよりよく動いてるように感じますよ?
ほかにも色々と使えそうなこのアイテム、是非お試しください お待ちしております。
 ロボット用ゲームパッド通信ボード SBRCB3BT ロボット用ゲームパッド通信ボード SBRCB3BT |
 SBRCB3BT用ケーブル SBRCB3BT用ケーブル |
 RCB-3HV ボードのみ RCB-3HV ボードのみ |