気づいたら4月終わりそうです。 あれっ?
ってことはゴールデンウィークがやってくるわけですが、もうお出かけの予定とかはたてられてますでしょうか?
「GWはせっかくの休みなんだからロボットに集中するんだよっ!」っという方もいるでしょう、ハイ私がそうしたいとこです………
というのも最近はプライベートでGR-001を使って色々と試しているのですがどうにもしっくりこない点があってモヤモヤとしています。
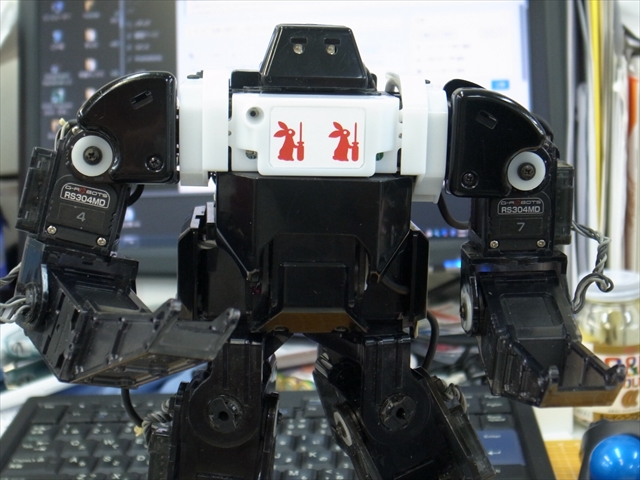
肘の関節の角度がどうにも微妙
何かポーズをつけるにしろ、肘の向きって結構表情出すのに効果あるのですが、GR-001はピッチ方向に動くだけなので、どうもしっくりこないのですよ。
ってとこで肘部分をどうにかしてみようってことなのですけど、実はGR-001は肘の取り付け角度は45度単位で付け替えられるようになっています。
普通の組立

はい、まっすぐです。
内側へ45度入れ込む

こんな感じになります
ちょっと強く見える?
で、90度回してみると

かなり雰囲気変わる?

肘打ちが強そう。
これやるとサンプルモーションの起き上がりとか色々と使えなくなるので再調整が必要になりますが、かなりイメージが変わるのでモーション作成の幅も広がるかと思います。
いや、そーじゃないっしょ!!
自由に動いたらもっと広がるでしょ!(きっと)
ということで、GR-001に肘軸を追加してみようってのが今回の趣旨です、前振り長かった……
コンセプトとしては
・切った貼ったせず、通常販売されている部品のみで製作する。
・可能ならば1kg以下に抑える。
・出来る限りサンプルモーションを流用出来るようにする。
極端な話、PCとドライバー数本あれば出来るようなのがいいなーっというところです。
で、使う部品を色々と考えてみて出てきた部品がこれです。

・RS304MD-H3b(RS301,302板をお使いの方はRS302CD-H3bに変更してください)
・GR-001 足首サーボホルダー(L/R)セット
・アルミオフセットアーム
・あとはサーボホーン、プラブッシュ、ゴムブッシュが必要になりそうです。あ、腕先どうしようか?
幸い腕部中継ハブには空きがひとつずつあるので、追加サーボはここを使えばハブの追加は必要無いでしょう。
次回は組付けて、実際どんな感じになるか検証していきます。
単体で完成された感のあるGR-001も色々とカスタマイズの余地があるので、ここでやらかしていきます。
 G-ROBOTS GR-001 足首サーボホルダー(L/R)セット |
 G-ROBOTS RS304MD-H3b |
 G-Robots用Bluetooth無線モジュール SBGRBT |