Pi:Co Classic3の発売を始めたので、安定して走らせるノウハウ(中川の場合)を書いておきたいと思います。
他にも方法がありますので、大会で交流する上で学んでいってください。
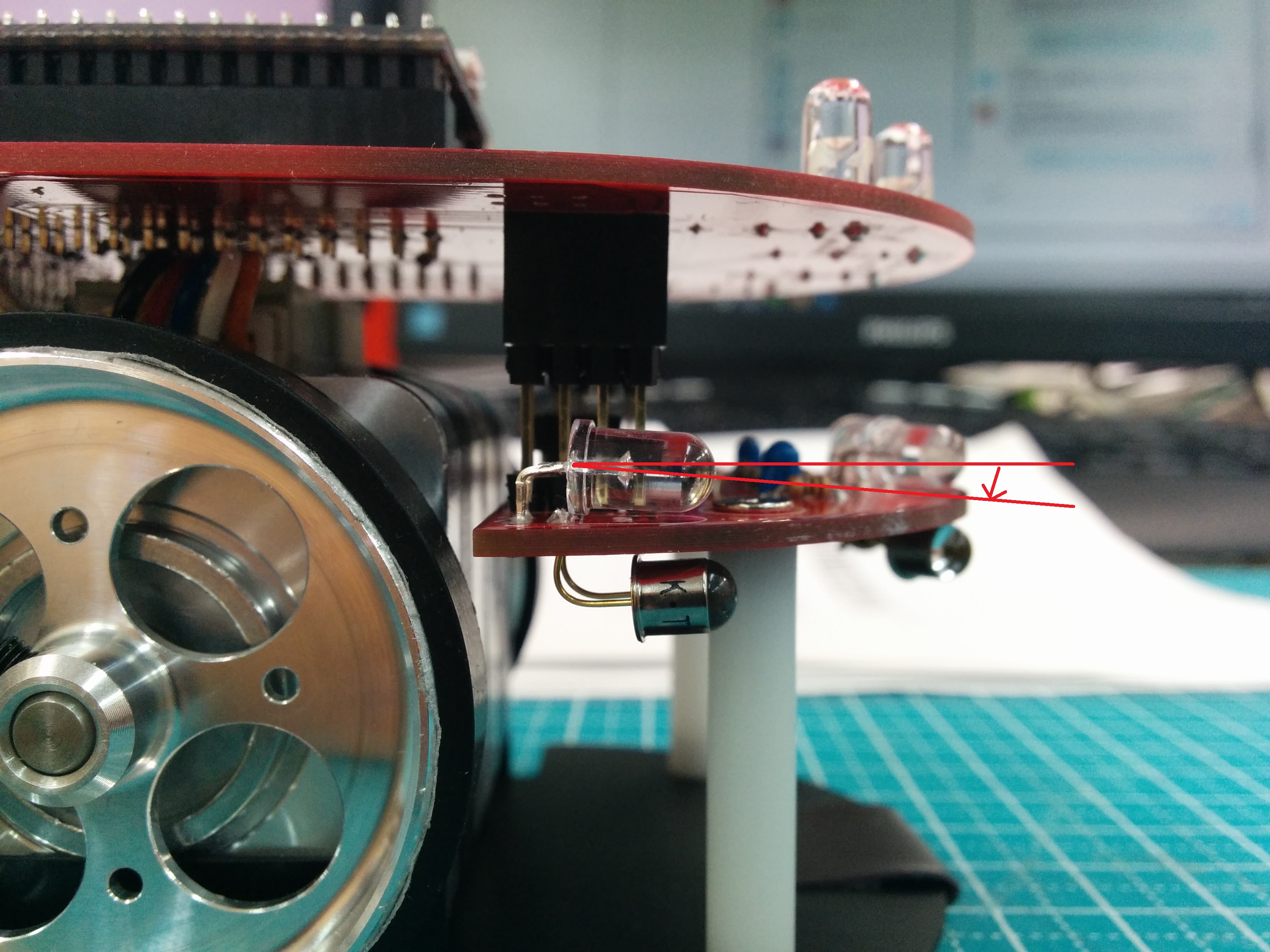
タイヤ・ホイールの場合
車軸とホイールの位置を合わせる(左右車輪)
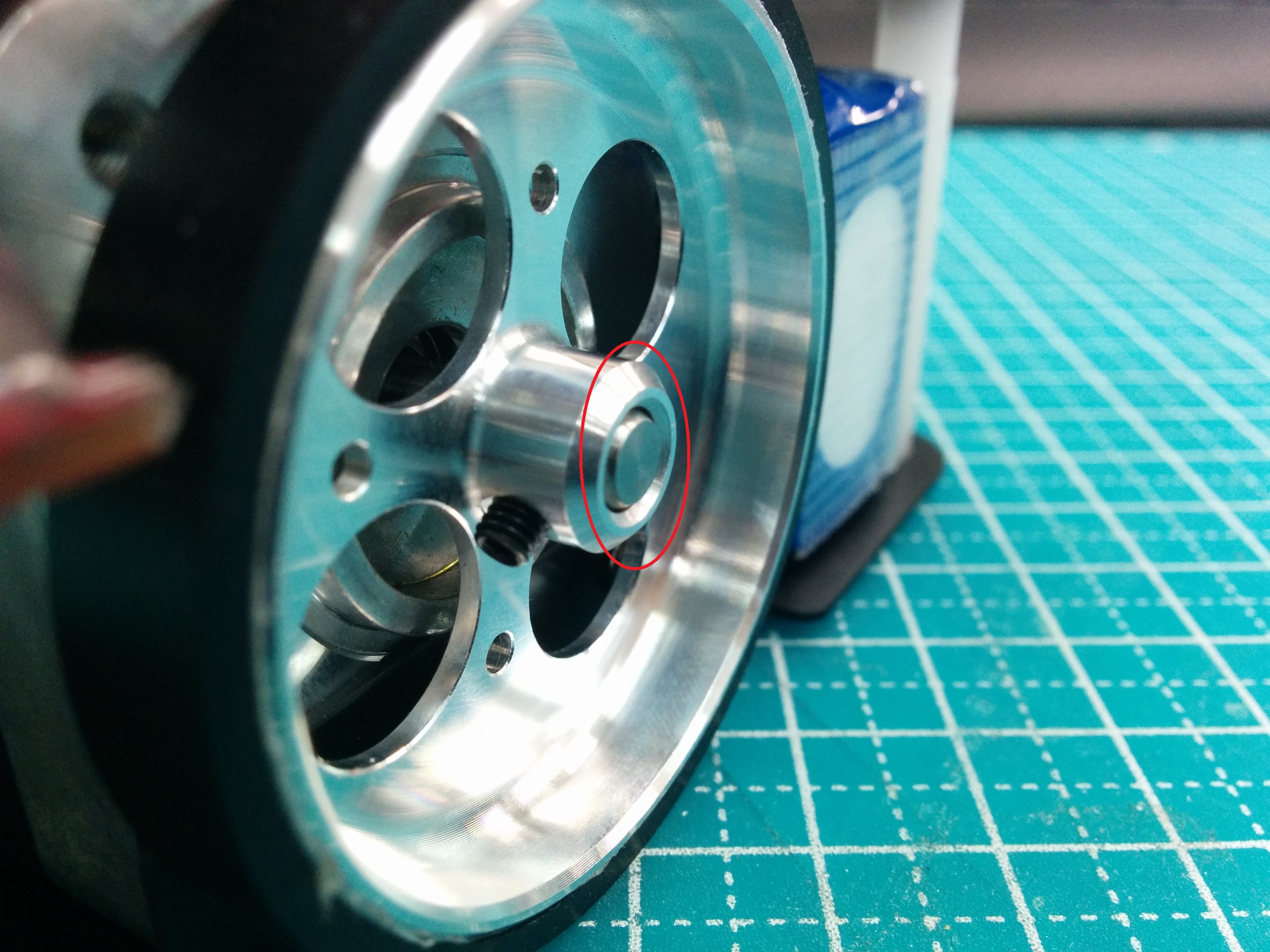
タイヤの位置をわせる+両面テープで固定
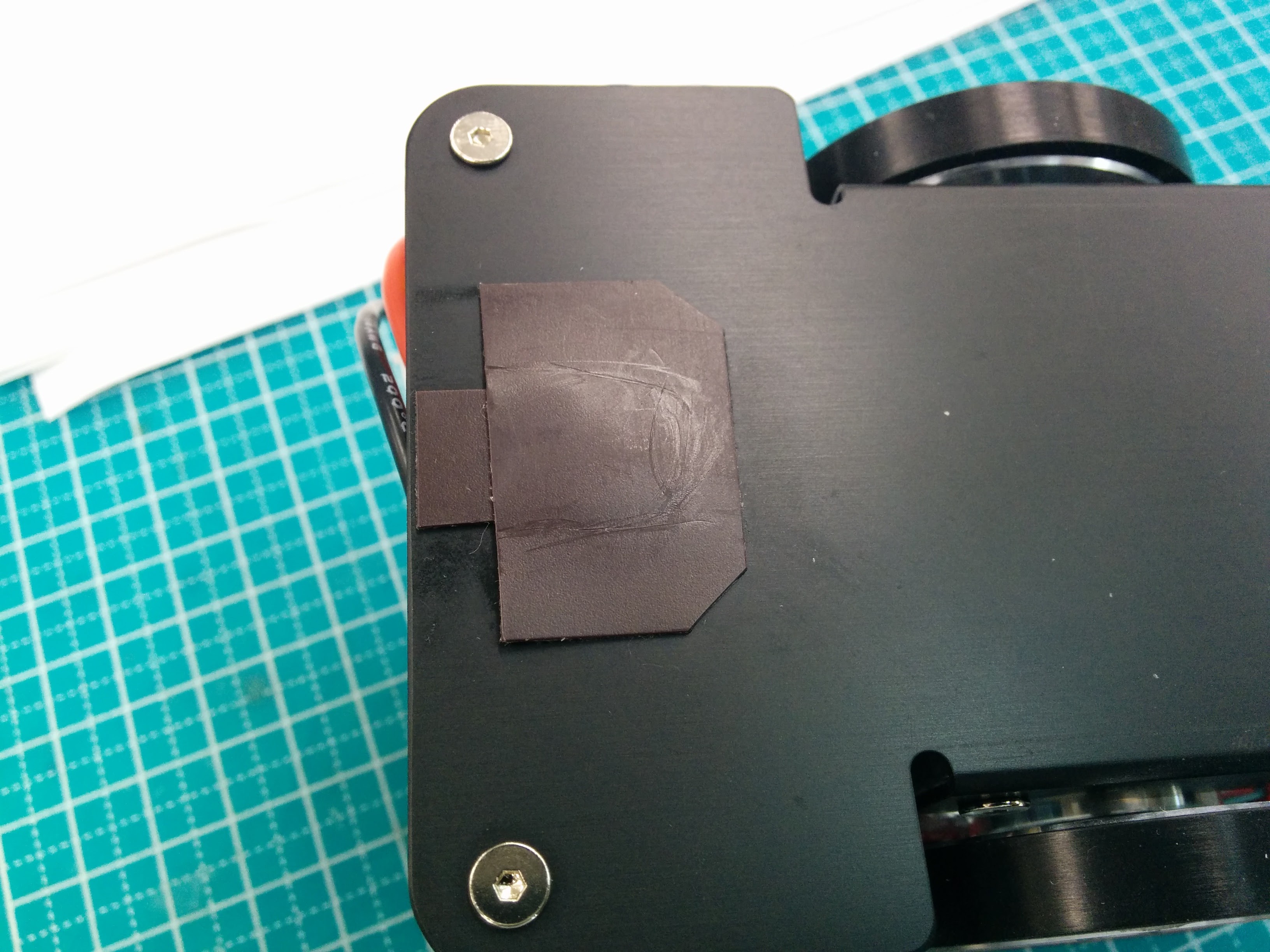
テフロンシートの場合
前側は段差があっても滑って乗り越えるように
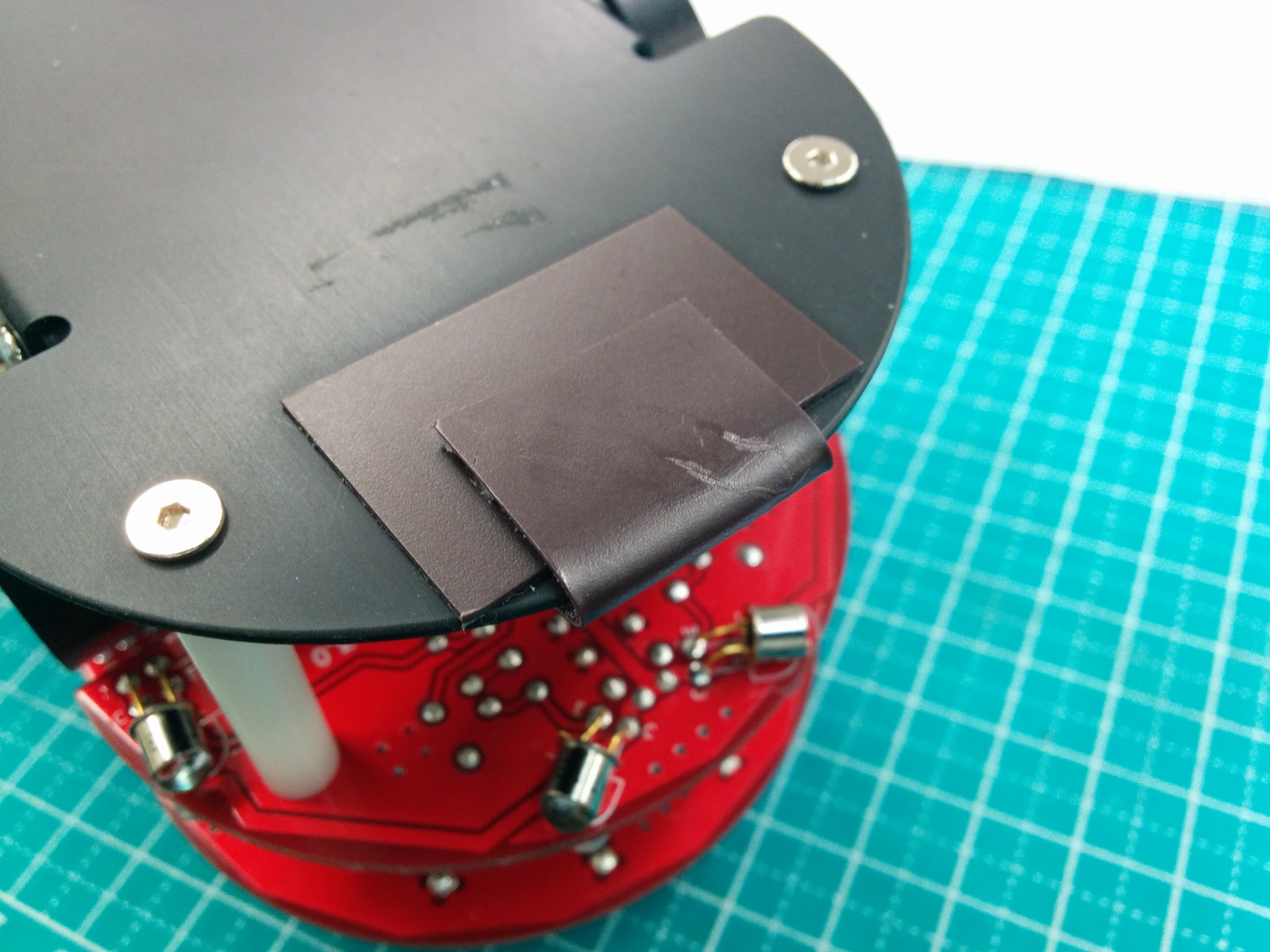
旋回時に段差で引っかからないように
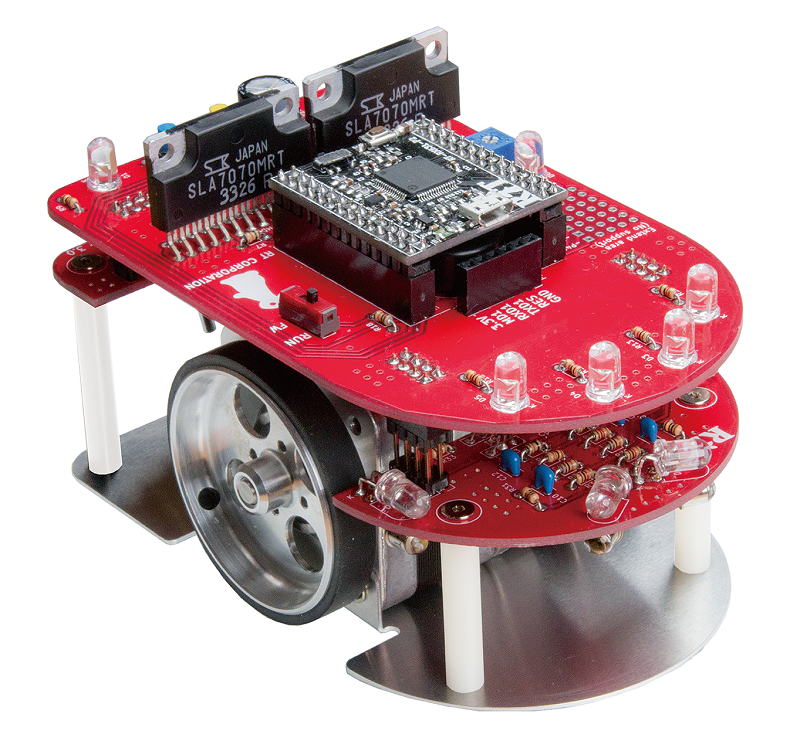
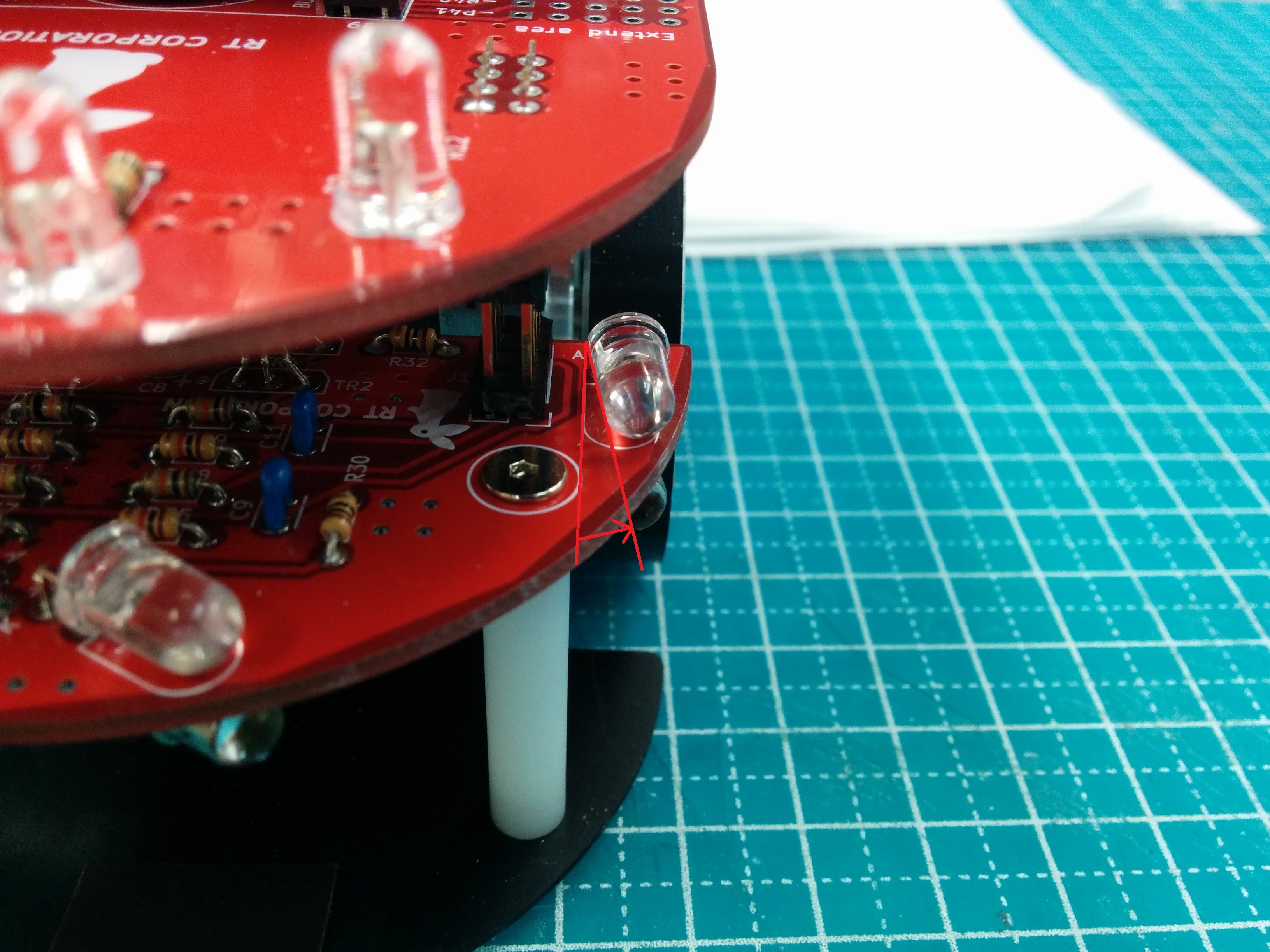
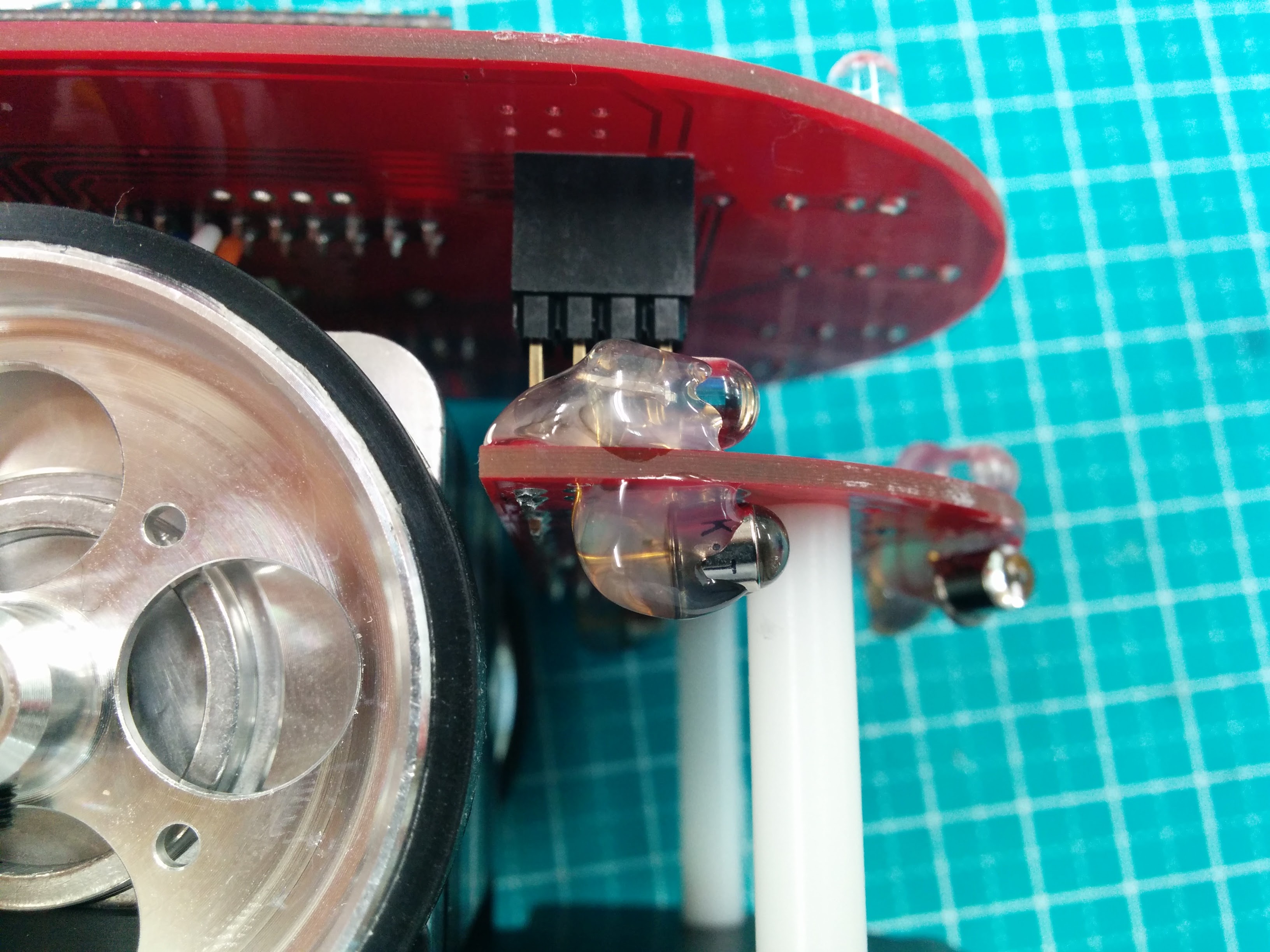
距離センサの場合
LEDの位置決め
壁に当たるよう、若干下向き

真正面にせず、横に少し広げる。(参考URL)
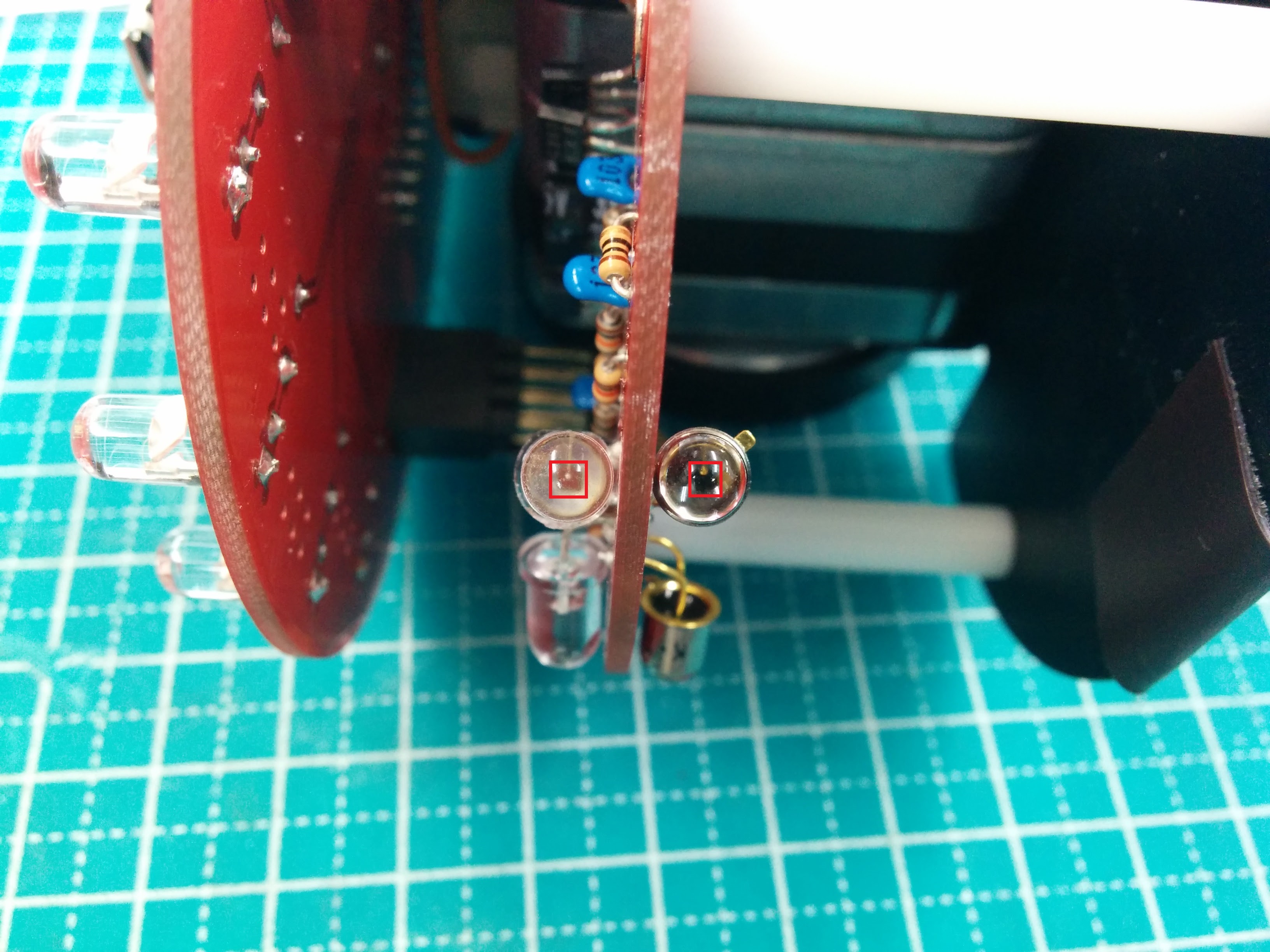
フォトトランジスタの位置決め
LEDの中の素子が四角く見える位置で、フォトトランジスタの素子が四角くみえるように向きを合わせる。
ここで、マウスを迷路においてLEDの赤色が壁に当たっているか、左右対称になっているかを確認しながらLEDの位置合わせ、
パソコンに送信したセンサの値を見ながら、フォトトランジスタの位置合わせを行います。
それが終わった後、
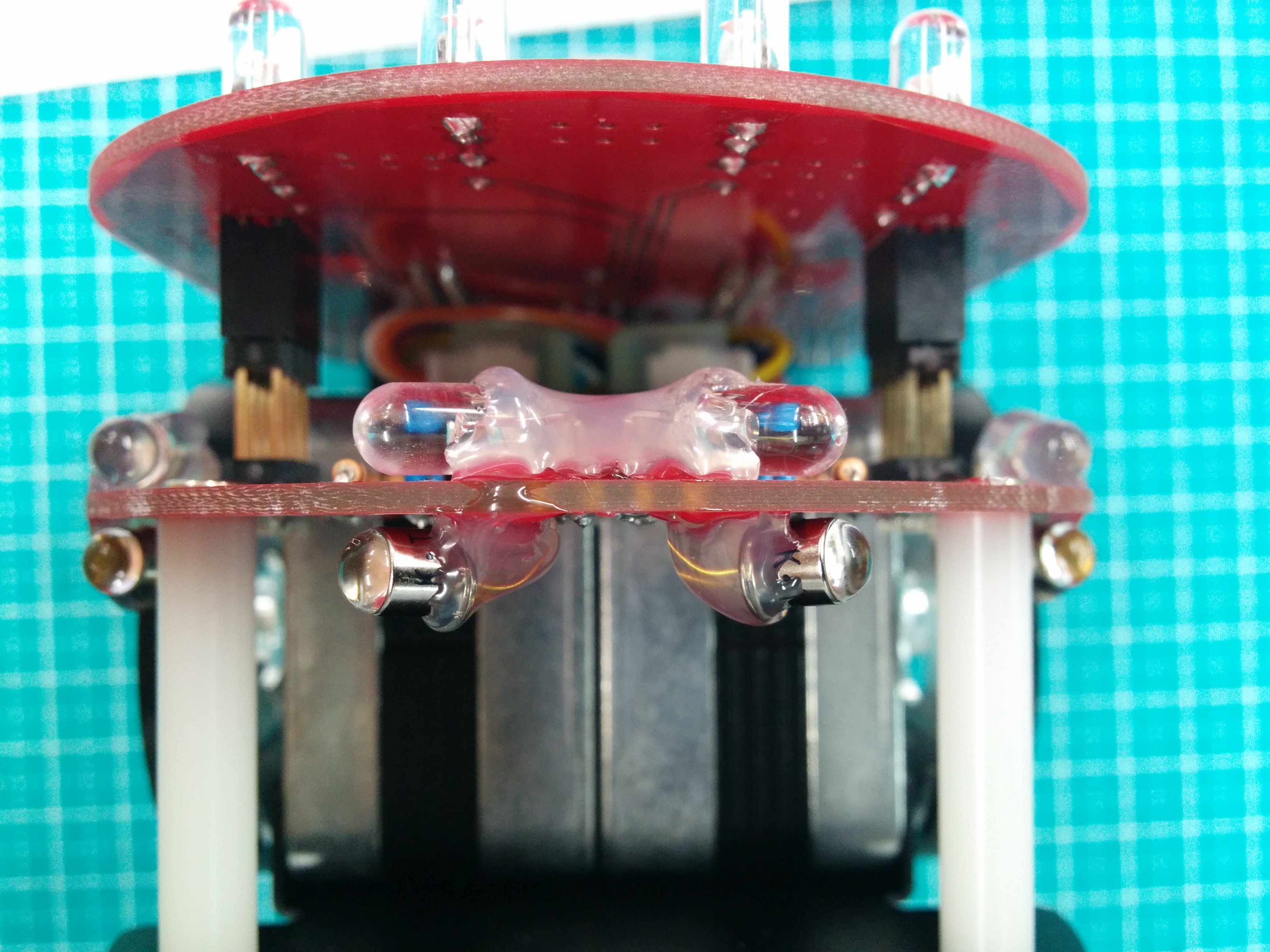
LEDとフォトトランジスタの固定
ホットボンドで止める 搬送時やロボットをつかむとき触って動いてしまうのを防ぐため
あとは、マニュアル通りタイヤの直径、トレッド径、センサの閾値、加速度調整を行うと完走できるようになります。
良いマイクロマウスライフを楽しんでください。