ドーモ Seijiです 気温の変動が激しすぎます。
前回導入までは行きましたので、今回は実際にCRANE+を動かしてみます。
ご購入を検討されているお客様としては「どのくらい持てるの?」というとこがやはり気になるようです。
なので実際にやってみました。
今回の動作環境は
・Windows10
・AC100V~12V5A ACアダプタ
という構成で実験開始。動作はサンプルプログラムの直接教示で行ってます。
* プルプルしてるのは前回同様Windows環境で動かしているから、次回Linuxでいきます。
まずCRANE+を固定するのですが、本体台座部に4か所固定用のΦ4穴が開いているのでこれをうまく使えたら使いましょう(Turtlebotにジャストサイズ)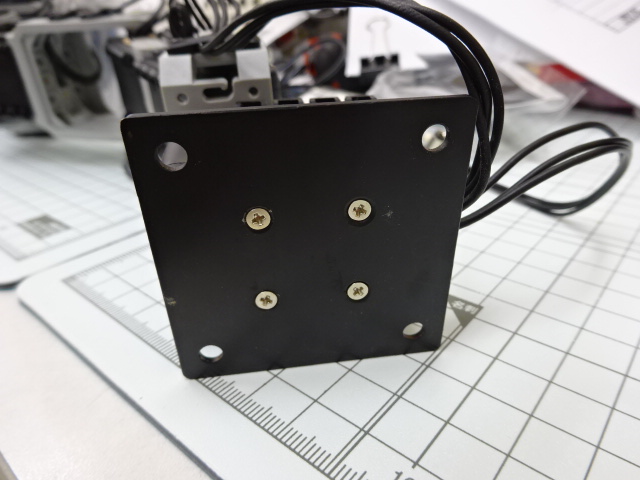
今回は机に固定するのでこんなクランプを用意しました。
まずは定番のペットボトル(中身無し)、20gからです。
特に問題なく持てました。実験に使うのでしたら負荷もなくサイズもちょうどいいのでペットボトルはおすすめです。
次はちょっと重量を上げてガムテープ、使いかけなので80g。
輪っかなので引っ掛ける感じで持ってみました。思ったよりいけてます。
次はもうちょっとだけ重量上げて缶スプレー、105gです。
実はここからの実験、ハンド部に滑り止めを付けています。滑り止め無しでは缶のような円柱状のものはもう持てなくなりました。
滑り止めを付けるとなんとか持ち上げて運ぶことは出来ましたが、モーターがほんのり熱くなりはじめてきたのでそろそろ限界な予感。
もう一段ハードル上げてACアダプタを試してみた、197g。
あ、上がった…
最後に飲もうと買ってきたコーヒーをやってみる、277gです
もういっぱいいっぱいです、モーターも熱くなるのでお勧めしません。
今回の実験の結果、CRANE+の持てる重量は80g程度でハンドが引っかかりやすい形状のモノです。
ただ、今回ある程度の重さのモノが持ち上げられたのは、あえてアームを水平に伸ばしたりせず、近くにモノを置いて掴ませていたからです。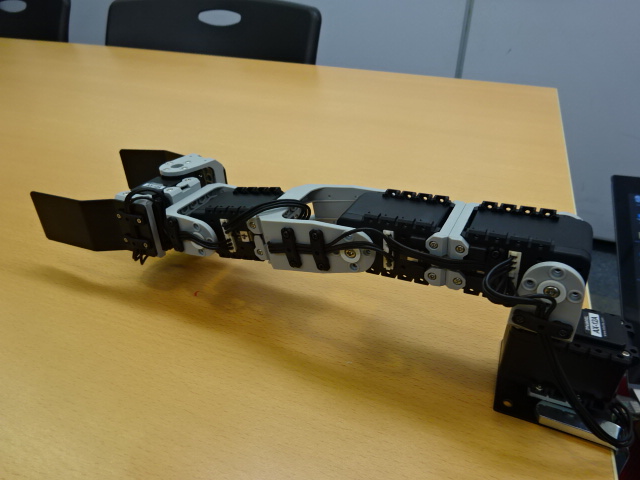
写真のような状態から上げようとするとかなりの負荷になりID2モーターが危険な状態になります。ですので実験で使う時もなるべくこんな姿勢で持ち上げるような動作は避けたほうが安全です。
そんなに重いものは持てないですが、コンパクトにロボットアームの実験ができるCRANE+
お手頃価格で販売中ですので、ぜひご検討ください よろしくお願いします。
次回はLinuxでの動作を予定しています。
注)今回行ったものは実験であり、メーカー保証外です。