ドーモ Seijiです。
今回はマイクロマウス大会に参加していた機体を紹介していきます。
今大会で参加している機体の種別としては参加カテゴリーにより
・クラシックサイズマイクロマウス
・ハーフサイズマイクロマウス
・ロボトレーサー
上記の3種類に分類されます。
まずクラシックサイズマイクロマウスですが
1.マイクロマウスに関する規定
1-1 マイクロマウスは自立型でなければならない。燃焼を利用したエネルギー源は許されない。
1-2 マイクロマウスは、競技中に操作者により、ハードウェアおよびソフトウェアの追加、取りはずし、交換、変更を受けてはならない。ただし、軽微な修理・調整は許される。
なお、特に必要と認められた競技会については、全く同一仕様のバッテリーの交換は許されることがある。
1-3 マイクロマウスは迷路内に本体の一部を放置してはならない。
1-4 マイクロマウスは迷路の壁を飛び越し、よじのぼり、傷つけ、あるいは壊してはならない。
1-5 マイクロマウスの大きさは、その床面への投影が1辺25cmの正方形に収まらなければならない。走行中に形状が変化する場合も、常にこの制限を満たしていなければならない。ただし、高さの制限はない。
という規定に収まっていれば自由です。Pi:Co Classicシリーズもこの規定に収まっています。
参加機体の傾向として「初心者はステッピングモーターを使った機体」というのはあります。Pi:Coもステッピングモーターを搭載しています。パルスで指示してステップ数をカウントすることによって距離がわかり、構造もシンプルなので入りやすいというとこもあるのでしょう。
弱点としてモーターが比較的重いのでどうしても重量が軽く出来ないため、優勝を狙うには厳しい面もあります。でも上位勢がチューニングしたPi:Co Classicが恐ろしくヌルヌルと速い機体に仕上げて来たのを見せてもらったとき「ああ、マウスはプログラミング次第だな」と実感しました。
今回の決勝参加機体を見ていくと



近年のトレンドを実装してきている機体がやはり決勝には多いです。
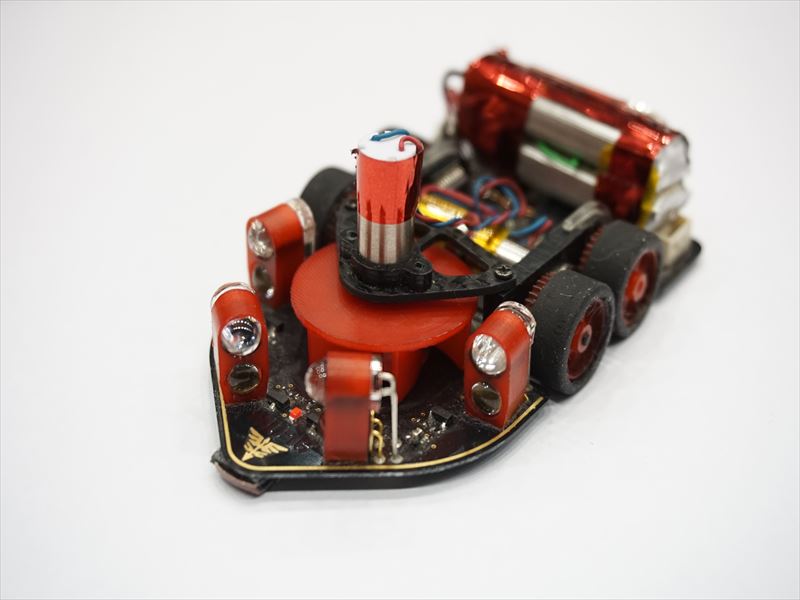
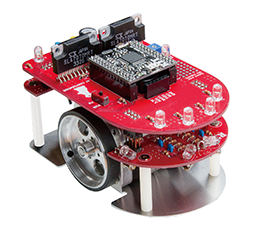
1:基板にモーター、エンコーダーを実装
2:変則4輪駆動
3:吸引機構
このあたりが定番のメカですね。
1はチップ部品が入手できるようになり、回路設計もCADを使って個人で基板作成できる環境が整ってきたので定番化してます。
2と3はロボットの高速化によるターン時のグリップ不足をなんとか補えないか?というところから来た技術。4輪にして接地面積を確保、加減速時のトラクションも分散して効率よく路面に伝える手段として採用されています。
吸引機構も「もっとターン速度を上げたい!」というところから来た技術で、以前から挑戦されていたのですが、変則4輪との組み合わせで広まった感はあります。2輪よりピッチングが安定してるから吸引と相性いいのかな?
 逆さにしても張り付いて落ちないデモ
逆さにしても張り付いて落ちないデモ
2と3はギヤボックスや、タイヤ、吸引機構を搭載するのでその分重くなるのですが、それでも搭載したほうが速いのでみんな採用しているのでしょう。
電池はほぼ全員がリチウムポリマーを採用していました。機体に合わせて電圧や容量は皆まちまちでした100mA~400mAといったところが主流のようです。
今年の傾向として目立ったのが3Dプリンタを使って機体パーツを作ってた機体が多かったですね。
センサー固定、ホイール、ギヤボックスあたりに使われていることが多かったですが、さすがにギヤまではまだ難しそうで、RCからの流用や切削加工品が主流でした。
30年以上続くこの競技、毎年新しい技術が現れるのでメカ好きにもたまらない競技です。
 写真のロボット「マッピー」は1981年に開かれた第2回全日本マイクロマウス大会にナムコから参加したロボットです。(ゲームは1983年に登場)
写真のロボット「マッピー」は1981年に開かれた第2回全日本マイクロマウス大会にナムコから参加したロボットです。(ゲームは1983年に登場)
シャーシは当時の一般的なウィング型と呼ばれるマイクロマウスと同様のものだが、上半身はキャラクター然とした外観となっていた当時2,000万円以上した高さ41cm、重量4.3Kgのロボットです。
後に再設計され、1983年に「マッピーキット」として78000円で発売されました。
ここから
こうなる

来年はどんな機体が出てくるか楽しみです。

