ドーモ Seijiです
前回クラシックマウスを紹介したので今回はハーフサイズマイクロマウスを紹介します。
・第37回マイクロマウス関連エントリーはこちら
ハーフサイズマイクロマウス機体の規定ですが
1.マイクロマウスに関する規定
1-1 マイクロマウスは自立型でなければならない。燃焼を利用したエネルギー源は許されない。
1-2 マイクロマウスは、競技中に操作者により、ハードウェアおよびソフトウェアの追加、取りはずし、交換、変更を受けてはならない。ただし、軽微な修理・調整は許される。
1-3 マイクロマウスは迷路内に本体の一部を放置してはならない。
1-4 マイクロマウスは迷路の壁を飛び越し、 よじのぼり、傷つけ、あるいは壊してはならない。
1-5 マイクロマウスの大きさは、その床面への投影が1辺12.5cmの正方形に収まらなければならない。走行中に形状が変化する場合も、常にこの制限を満たしていなければならない。ただし、高さの制限はない。
といようにクラシックの1辺25.0cmの半分のサイズになっており、迷路の区画も18cmから9cmとなります。
もうひとつの違いとして、クラシックは迷路サイズが16×16サイズでゴールは中央と決まっていましたが、ハーフ全国大会決勝では迷路サイズが最大32×32となり、事前に座標が指定されます。どちらも迷路自体は当日始まるまで非公開です。
第37回決勝の迷路情報は
・迷路サイズ:32x32
・ゴール領域入口:X3、Y3
・ゴール領域:3区画X3区画
・ゴール領域内の柱:存在しない
・持ち時間:10分間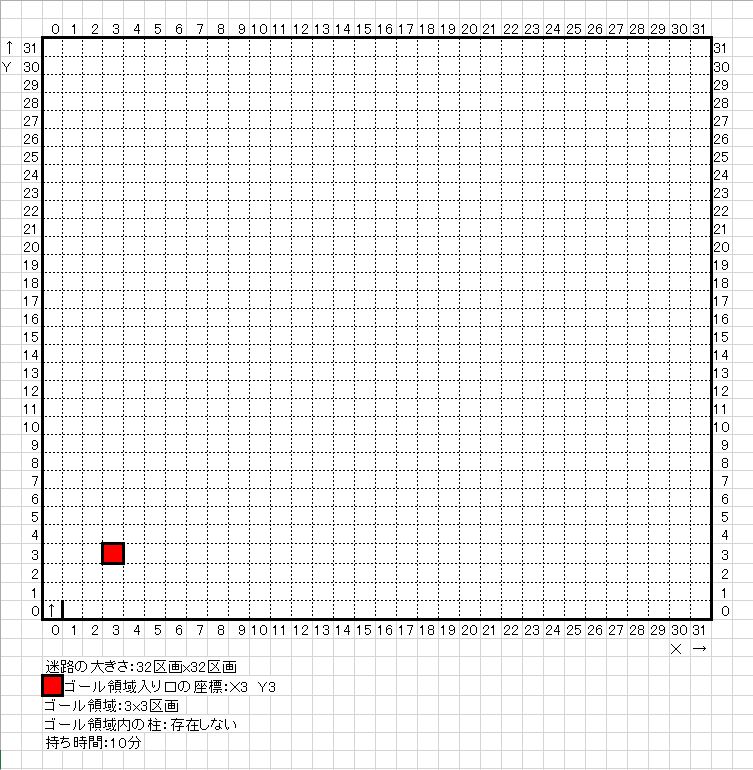
というように決勝用迷路はスタートのすぐそばにゴールがあるというとこまで事前情報があったため「これは対角に斜めくるか?」と予測されていたのですが… はいっ、見事な対角線ルートがありました。
はいっ、見事な対角線ルートがありました。
区画9×10からゴールへの斜め侵入という最短経路を走る機体が多かったですが、上位勢は区画30×30の最長斜めルートをえらびんできっちり走りきっていました すごいよ。
そして殆どの機体が西廻りルートで走るなか松井氏は南廻りルートからのルートを選び、見事ぶっちぎりの優勝を決めました おめでとうございます。
走行動画 19分43秒あたりから
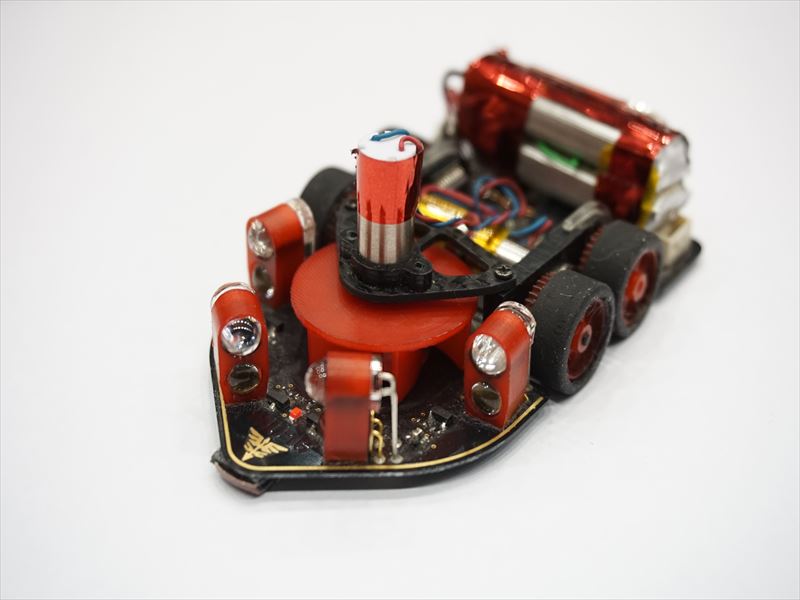
これが優勝機体

変則4輪に吸引機構というクラシックサイズでのノウハウをハーフサイズへ落とし込み、見事に調整しての優勝でした。
今回惜しくも完走できなかったのですが、個人的にお気に入りの機体がこちらです。
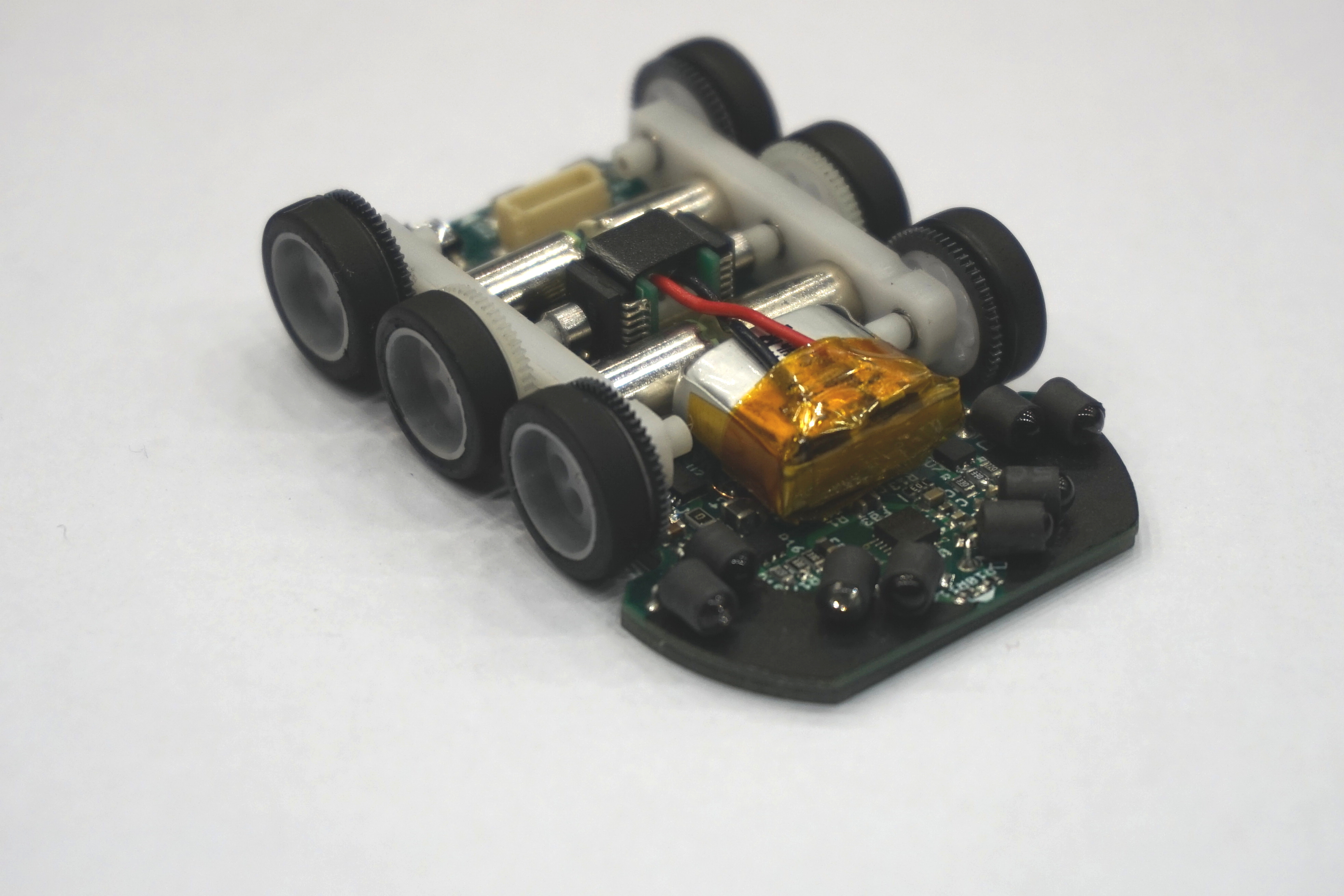 Khiew Tzong Yong氏のロボットなのですが6輪です。私達の世代は「6輪」っていうキーワードに敏感です、また来年走る姿が見たいロボットです。
Khiew Tzong Yong氏のロボットなのですが6輪です。私達の世代は「6輪」っていうキーワードに敏感です、また来年走る姿が見たいロボットです。
ハーフサイズは2007年大会でデモンストレーション走行、2008年にはプレ競技が行われ、2009年から本格的競技としてスタートしました。
規定が公開されたときは「出来ないよ」「クラシックのほうが速くていい」等という意見もありましたが、当初の見込み通り小型部品の調達もしやすくなり、独自のノウハウも蓄積されていき、ひとつの競技として定着いきました。
うちからも「Pi:Co Half」という完成品ハーフサイズマウスを販売しており、これを使って始められたという方も多いのではないでしょうか。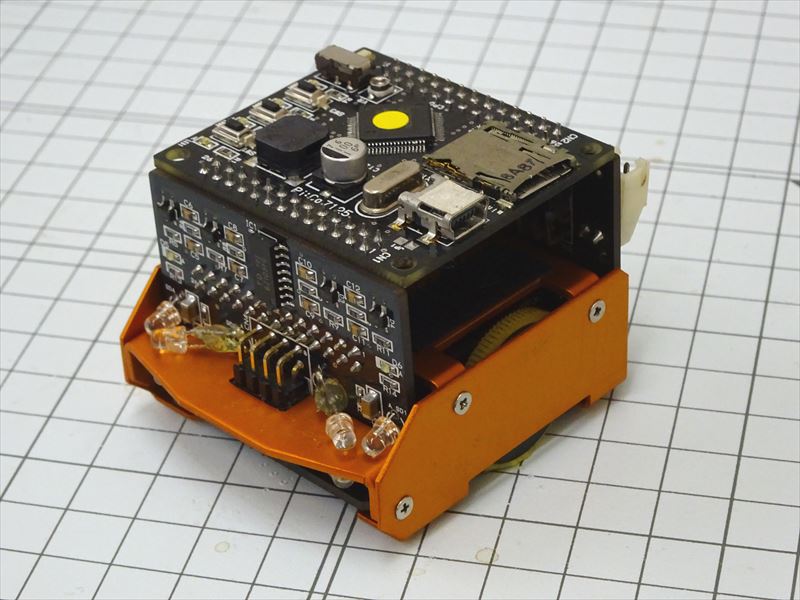 このPi:Co Halfは私の個人機体で、入社時から研修兼デモ機として活躍してくれてました。総重量120gという今では重量機体、当時は軽量な部類というここだけみてもハーフサイズの進化が伺えます。
このPi:Co Halfは私の個人機体で、入社時から研修兼デモ機として活躍してくれてました。総重量120gという今では重量機体、当時は軽量な部類というここだけみてもハーフサイズの進化が伺えます。
今現在ハーフサイズマイクロマウスのキットは販売されておりませんが、製作に欠かせないパーツ類は各種揃えておりますので、ぜひご利用ください。
 コアレスモータMK06-4.5(2個入り) コアレスモータMK06-4.5(2個入り) |
 精密切削ピニオンギヤ(m0.3 T9 2mm) 2個入り 精密切削ピニオンギヤ(m0.3 T9 2mm) 2個入り |
 コーデンシ製フォトトランジスタST-1KL3A コーデンシ製フォトトランジスタST-1KL3A |