ドーモ Seijiです
前回「PCでサーボを動かそう Futaba編」を掲載しました、今回はROBOTIS編です。
ROBOTISのDYNAMIXELシリーズは結構シンプルな構成で、MXシリーズの場合 末尾がRのものがRS485で4線式、TのものがTTL信号で3線式になっています。
PCからの接続に使うパーツはRS485もTTLも同じものを使います。
・USB2Dynamixel
PCのUSBに挿す信号変換機 RS232C、RS485、TTLの3種類に対応
・SMPS2Dynamixel
サーボを接続するハブ、電源供給口も兼ねています。
上記の2つと、12Vの電源があれば準備完了です。電源プラグはΦ2.5のセンタープラスです。
SMPS 12V5A PS-10 [US-110V]という12VACアダプタもありますのでこれを用意するのが簡単です。
 USB2Dynamixel_INT USB2Dynamixel_INT |
 SMPS2DYNAMIXEL SMPS2DYNAMIXEL |
 SMPS 12V5A PS-10 [US-110V] SMPS 12V5A PS-10 [US-110V] |
接続例がこちら(USBハブ経由で接続)
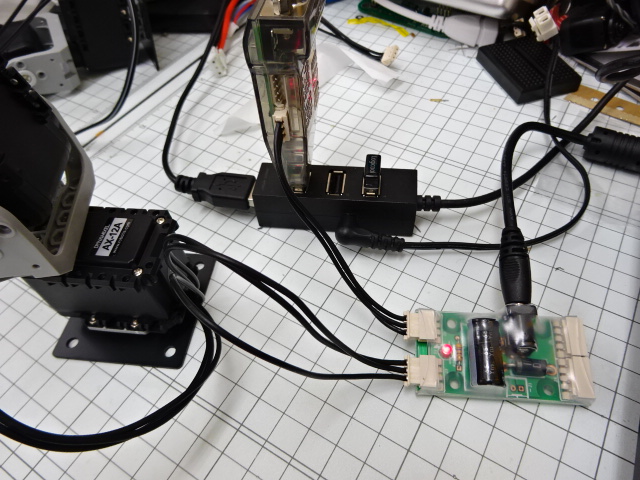
SMPS2Dynamixelには3線式、4線式それぞれ2個を並列接続できます。(混載は不可)
動かすにはサーボにIDを設定していくのですが、設定にはROBOTISより配布されている「RoboPlus v1.1.3.0 (July 8, 2014) ? JAPANESE Ver.」をダウンロードして使います。
ダウンロードして起動したらまず最新版にアップデートします。できたらDynamixelWizardからCOMポートを指定して接続。成功したら繋がってるサーボが左ツリーに表示されるので変更するサーボをクリックして設定画面から設定して更新していきます。
ディジーチェーンで接続されているものが全部表示されますが、IDが被ってるものがあると表示されなくなるので、一番最初の設定は一個ずつ繋いで設定していきます。初期設定ではIDは1が設定されているのでそのままチェーンで繋ぐと見えなくなるので注意です。
他にもOpenCM9.04を使った方法等も最近流行っているので、こちらもまた紹介させていただきます。
このように比較的シンプルに構成できるのがROBOTIS製品の特徴でしょう。
WebShopではROBOTIS製品も豊富に揃えておりますのでぜひご利用ください。
皆様のご利用お待ちしております。
 ROBOTISサーボ関連 ROBOTISサーボ関連 |
 OpenCM9.04-C OpenCM9.04-C |
 ROBOTIS MINI ROBOTIS MINI |