ドーモ Seijiです
先日 ROBOTISよりDynamixel MXシリーズのDXL protocol2.0への対応が発表されました。
通常は1.0で出荷されているので2.0へは各自でファームウェアの更新作業が必要となります。
MX(2.0)シリーズのメリットですが
・Dynamixel Pro,XM430などProtocol2.0のDYNAMIXELと同時に使用できる。
・リバースモード(出力軸の反転)が新たに使用可能になった。
・Shadow ID機能。同一IDで複数のサーボをコントロール可能になった。
リバースモードとShadow IDを組み合わせると、MX106以外では今まで出来そうでできなかった「ダブルサーボ」が出来るようになります。
・Xシリーズと同等のコントロールテーブルのため、Xシリーズで開発したプログラム資産が流用可能
大きなメリットとしてはやはりMX、Xシリーズ,PROを混載して使用できるというところですね。リバースモードとShadowIDの組み合わせも2個を繋いで1個のサーボにみたてて使えるというのも大トルク稼ぐために並列に組んだりする場合に便利です。
ここで実際にファームウェアのアップデートをやってみます。
(注)Protocol2.0から従来のファームウェアへの復旧はDynamixel Wizardで行うことが出来ます。今回はMX-64Rをアップデートしてみます。
アップデートに使用する機材はこちら。

・USB2Dynamixel_INT
・SMPS2Dynamixel
・SMPS 12V5A PS-10 [US-110V]
MXシリーズのprotocol2.0対応ファームウェアへのアップデート(recovery)はR+Manager2.0を使用します。
ダウンロードはこちらから
ダウンロードしてインストールが完了しましたら起動するとアップデートが始まります。(要ネットワーク環境)
起動したらまず【DYNAMIXEL】を選びます。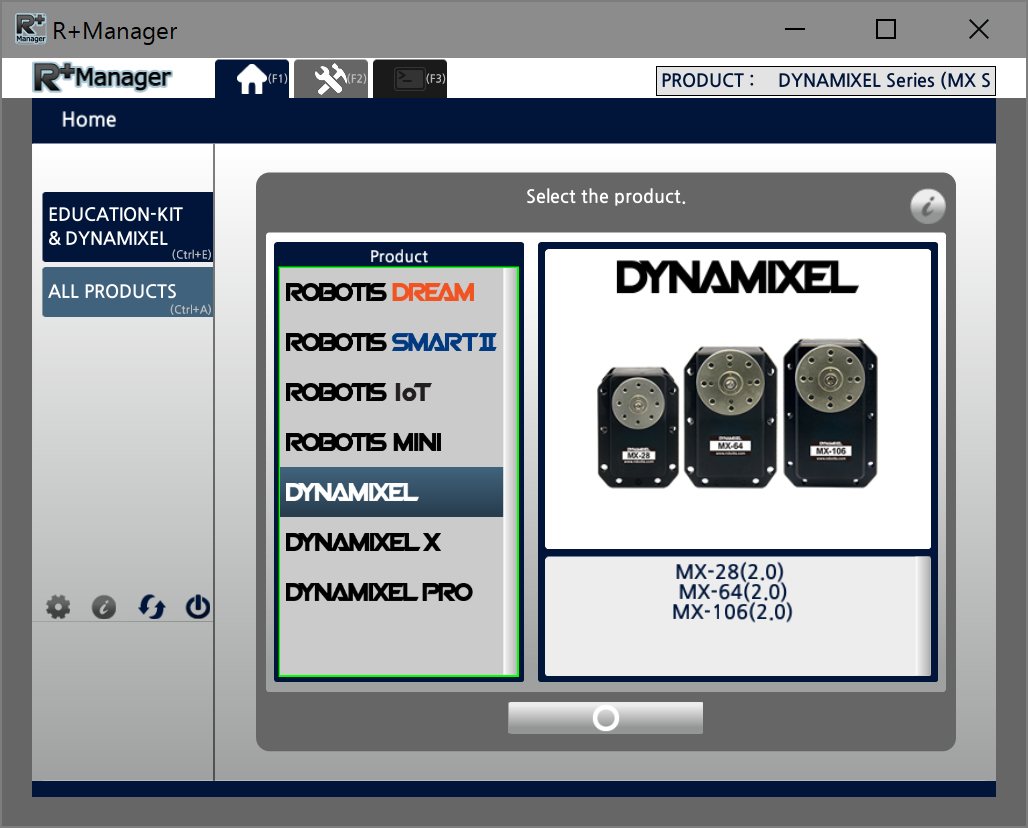
【Firmware Recovery】を選択して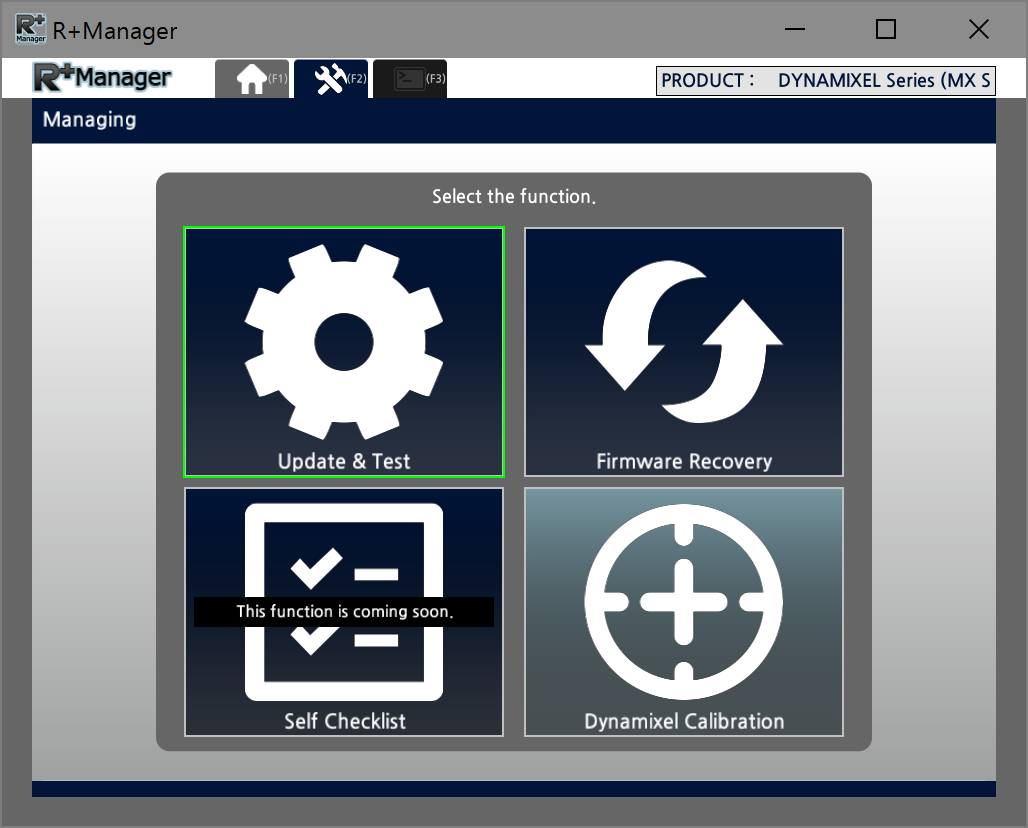
【Next→】を押して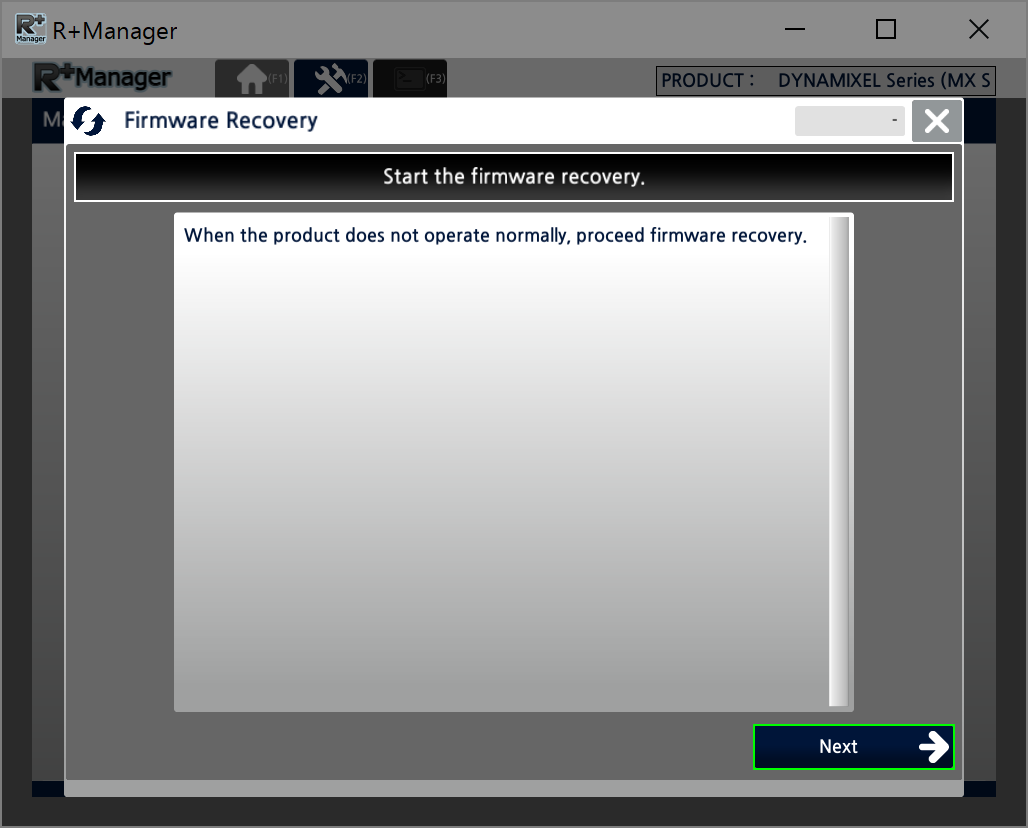
ProductはMX-64(2.0)を選択して【Next→】を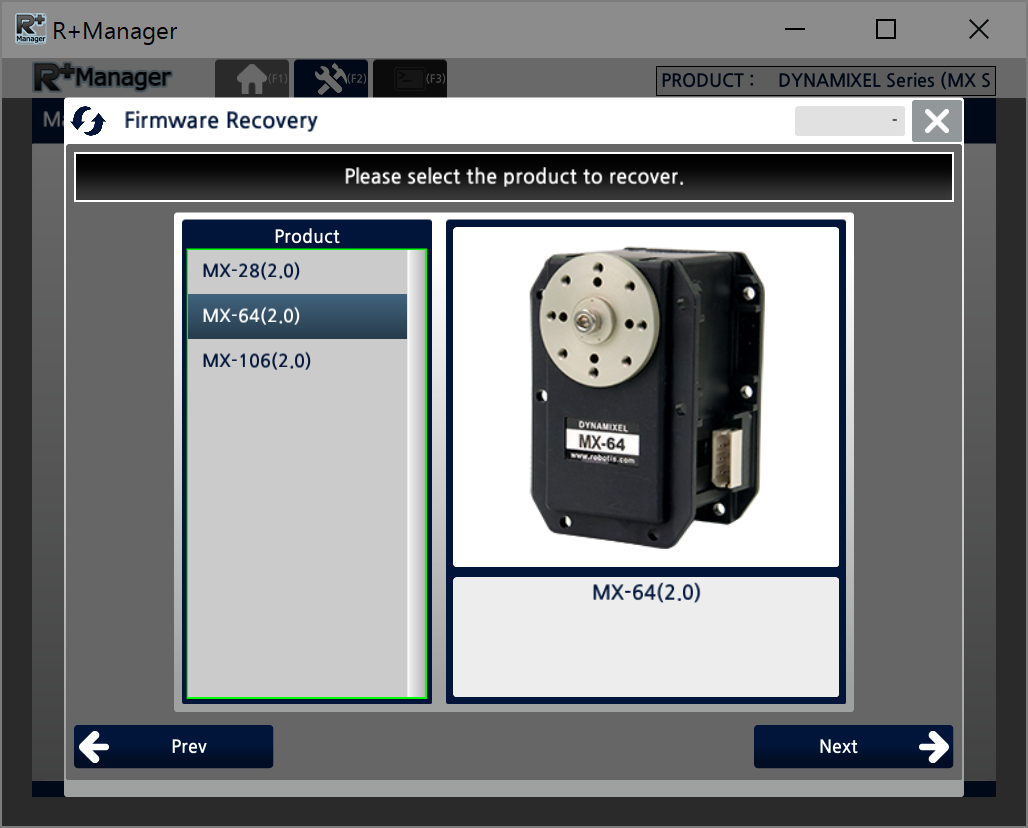
【◯】を押して進めて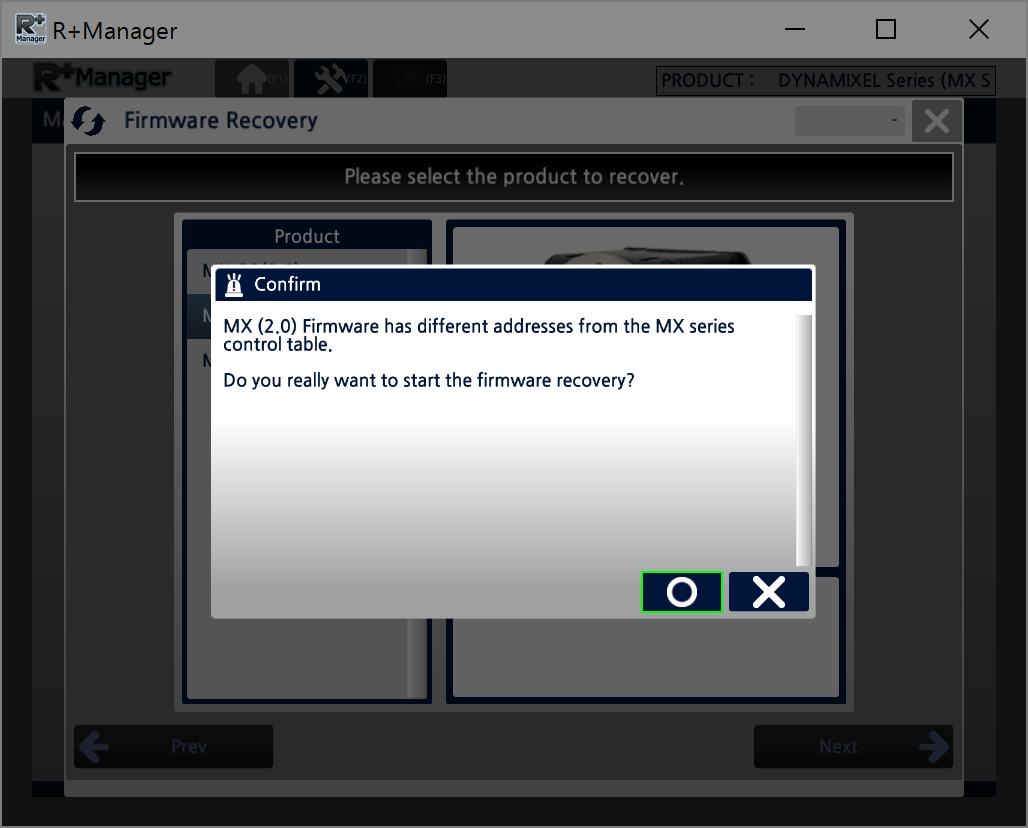
OpenCM9.04経由でも出来るそうですが今回は使っていないので【Next→】を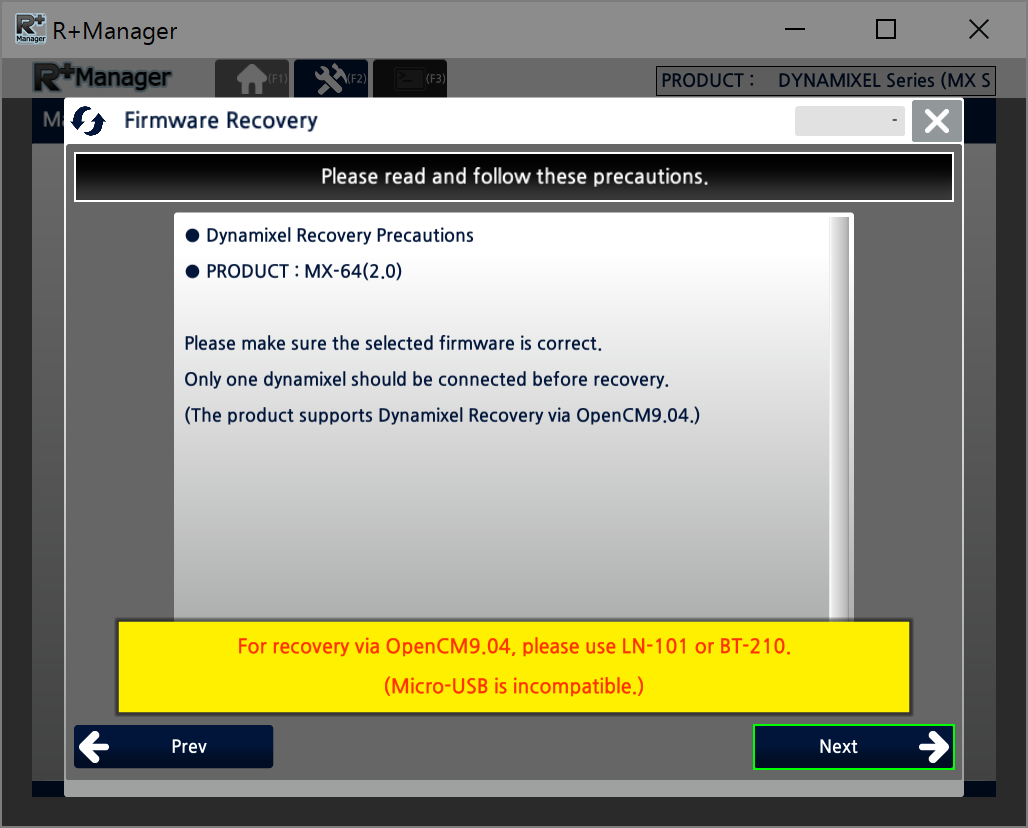
USB2Dynamixelが使っているCOMポートを選択して【Next→】を押す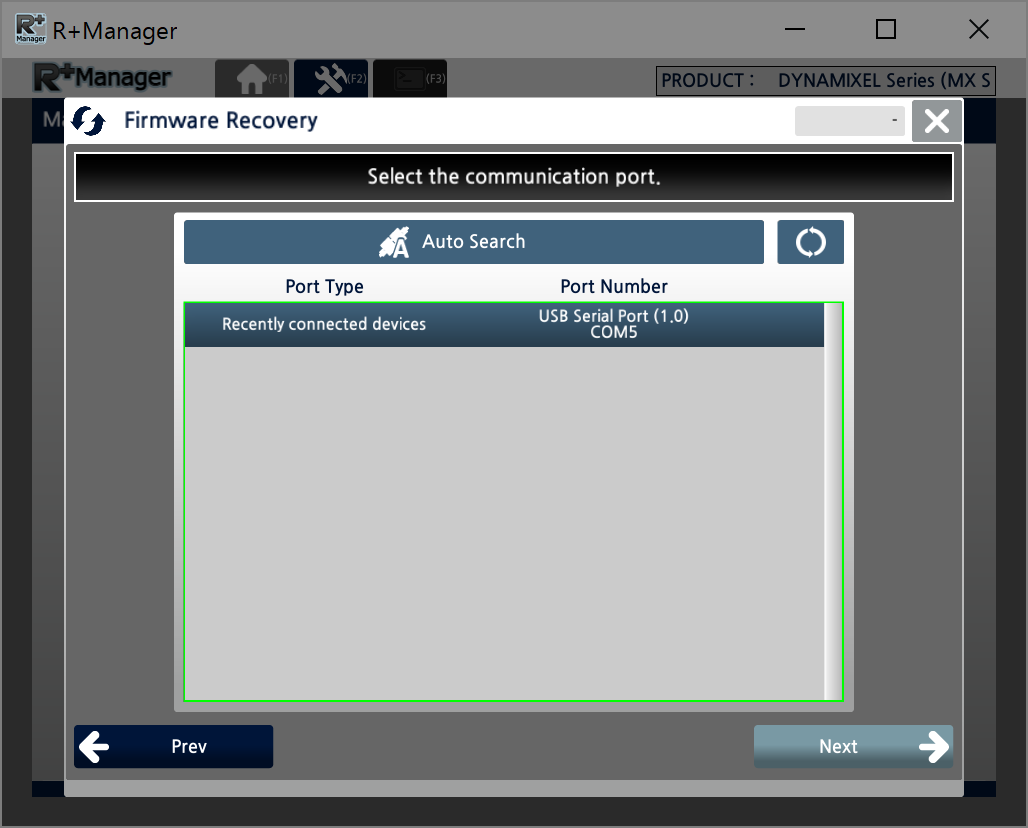
この画面まで来たら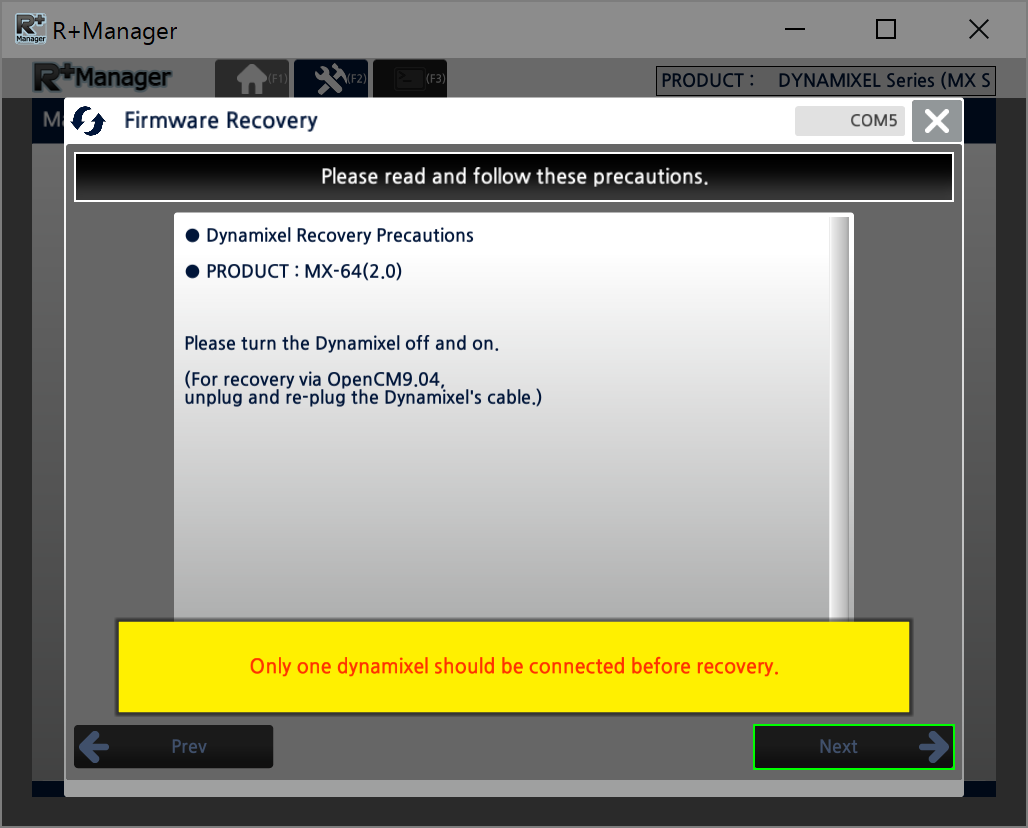
SMPS2Dynamixelの電源を抜きます。この時LEDが完全に消灯することを確認します。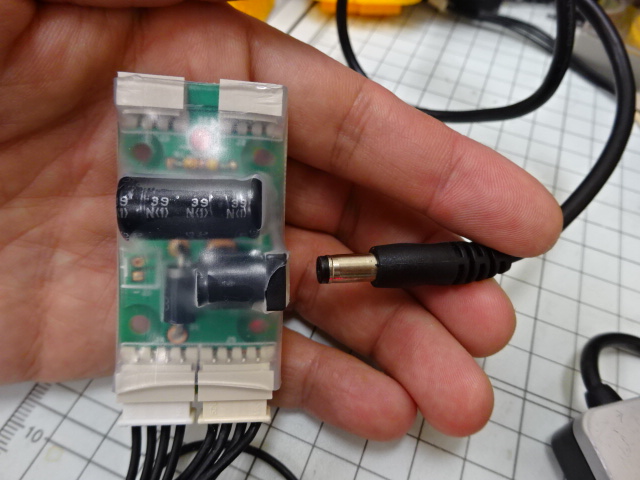
消えたことを確認したら再度電源投入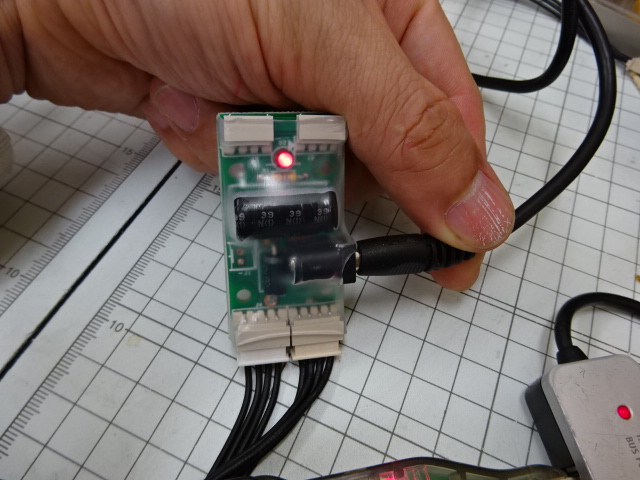
すると先程まで押せなかった【Next→】が押せるようになったので押して進めます。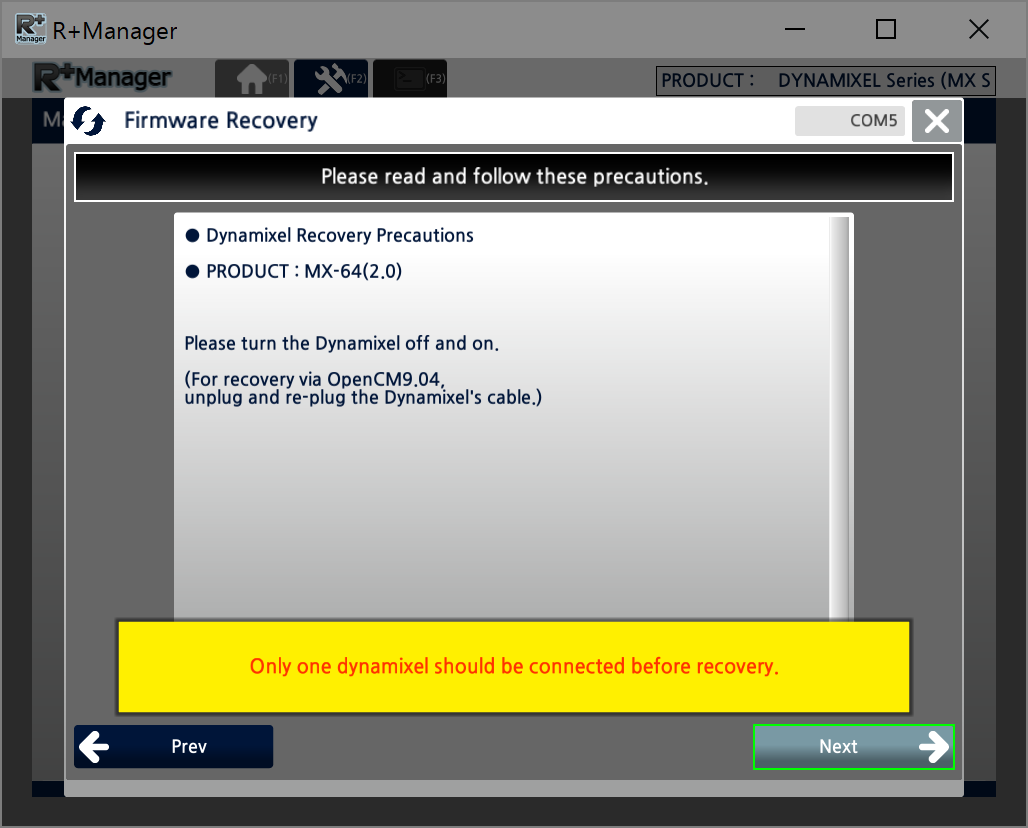
更新内容を確認して【Next→】を押します。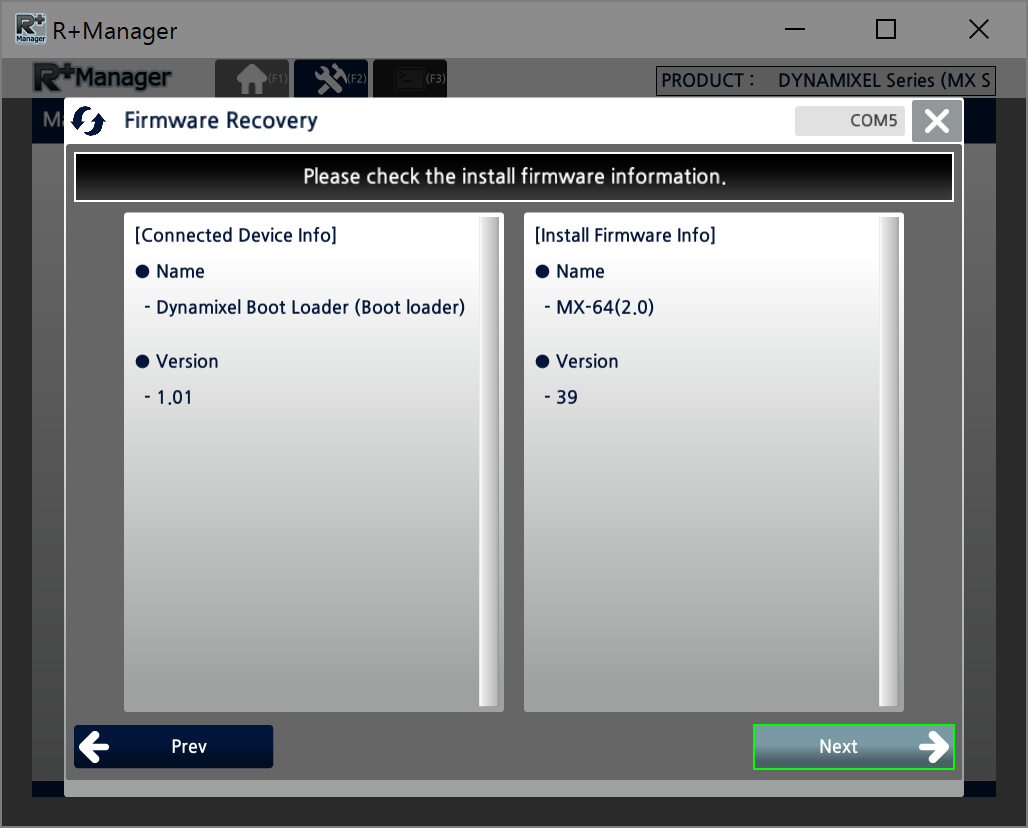
するとステータスバーが伸びていって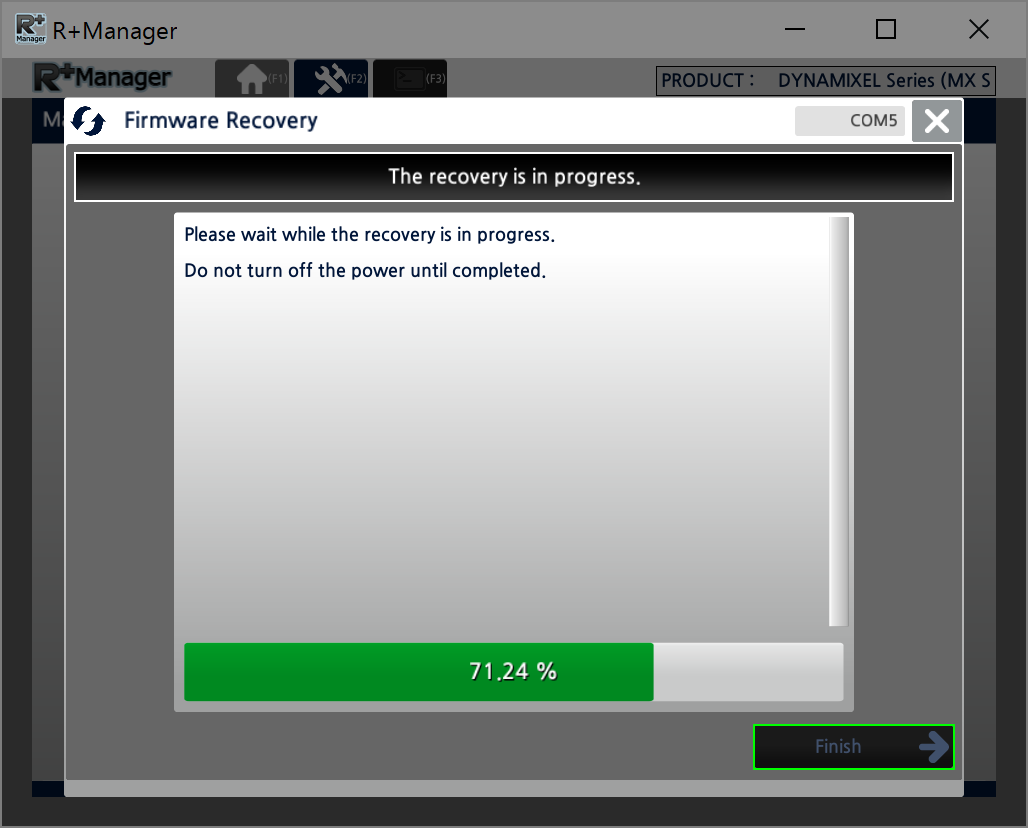
100%で更新完了です。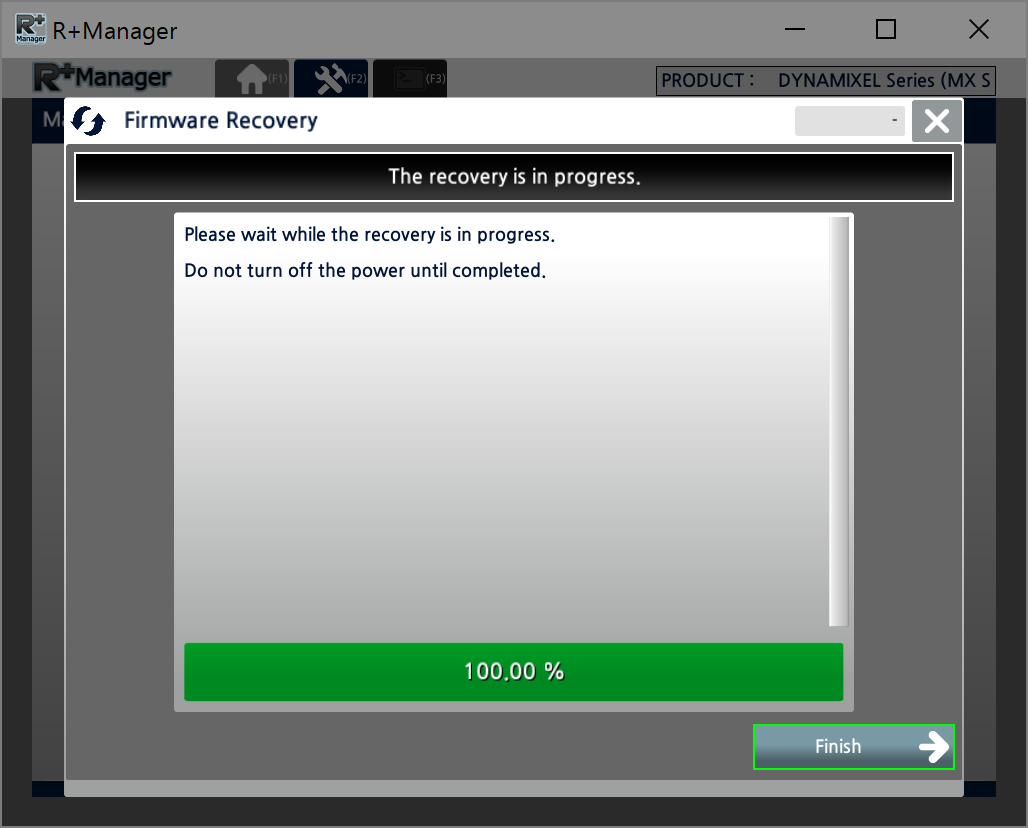
以上で更新は完了です。おつかれさまでした。
(注)Protocol2.0から従来のファームウェアへの復旧はDynamixel Wizardで行うことが出来ます。
また、AXシリーズ、RXシリーズ、XL-320はProtocol2.0には未対応です。
これでMXシリーズと新型Xシリーズとの混載が出来る様になるのでそれぞれの性能を活かしたロボット製作へと妄想が膨らんできます。
今回使ったアイテムはすべてWebShopでお取り扱いしておりますので是非ホ利用ください。
皆様のご利用お待ちしております。
 ROBOTISサーボ類 ROBOTISサーボ類 |
 USB2Dynamixel_INT USB2Dynamixel_INT |
 SMPS2DYNAMIXEL SMPS2DYNAMIXEL |