距離30m、190°の範囲を自由なエリア設定で物体検出する屋外用レーザスキャナ(LiDAR)。雨、霧などの屋外フィルタ搭載、ヒータ搭載で-30℃可能、屋外用搬送車やクレーンなどの障害物検知、屋外の侵入検知などの用途に。
■従来のUXM-30LN-PWに比べ、計測精度、角度分解能、最大検出距離アップ
計測精度 ±30mm(1.6倍)、角度分解能 0.125°(2倍)、最大検出距離 80m(白ケント紙)
■屋外用フィルタを搭載※

雨フィルタ………エリア内を移動するものやランダムに検出するものに対するフィルタです。
霧フィルタ………空中に漂う霧や煙に対するフィルタです。
感度フィルタ……反射が弱いものを除去するフィルタです。外乱光や雨などのノイズの除去に効果があります。
エコーフィルタ…雨粒やガラス面、物体の境目などの入射により複数エコーがある環境では、エコーフィルタを
選択することで、最初のエコーまたは最後のエコーで判定することができます。
※フィルタを適用することで、感度や応答速度に影響し、検出できなくなることがあります。
設定後は実機による十分な検証を行ってください。
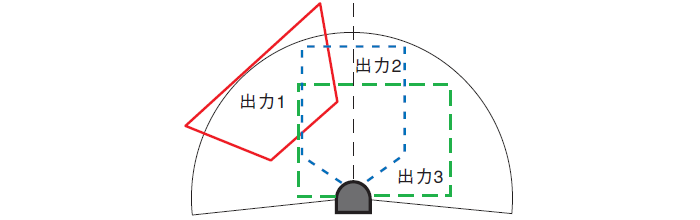
■エリア設定により飛び地エリアも可能に
 ■ヒーター機能により結露防止
■ヒーター機能により結露防止
(寒冷地可)
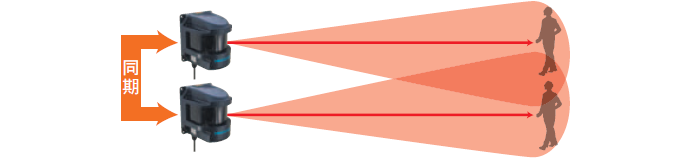
■同期機能による干渉防止
 ■スキャン範囲
■スキャン範囲
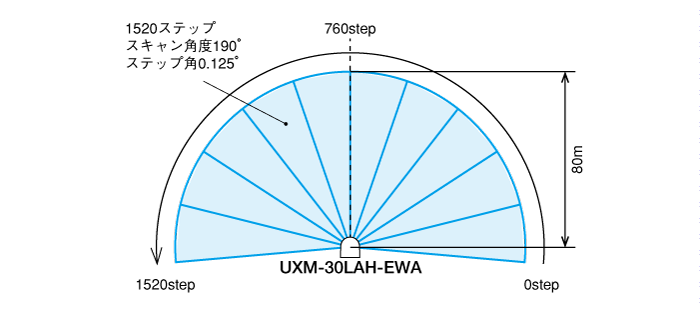
注)上図は白ケント紙が検出可能なエリアで、最大検出距離は白ケント紙1000×1500mmで80m、
黒紙500×500mmで30mです。検出体の種類により最大検出距離が異なります。
製品仕様
| 種類 |
測域センサ |
| 形式 |
UXM-30LAH-EWA |
| 光源 |
半導体レーザー λ=905nm、レーザー安全クラス1 |
| 電源電圧 |
DC10~30V |
| 電源電流 |
定常時電流 DC12V時 600mA以下、DC24V時 300mA以下
起動時電流 DC12V 1.5A以下、DC24V 0.75A以下
ヒーター使用時(0℃以下) DC12V時 1.25A以下、DC24V時 1.25A以下 |
| 消費電力 |
7.2W以下(定常時)
ヒーター使用時(0℃以下) DC12V時 15W以下、DC24V時 30W以下 |
| 検出距離及び検出体 |
検出保証値 0.1~30m※1 (反射率10%黒紙 500mm×500mm)
0.1~80m※1 (反射率90%白ケント紙 1000mm×1500mm)
最大検出距離:80m(エリア設定最大値)
最小検出物 33mm(5m)、65mm(10m)、200mm(30m) |
| 距離精度 |
反射率10%黒紙 0.1~15m:±30mm、15~30m:±50mm※1
0.1~30m:±50mm※2 周囲照度 3,000lx以下
0.1~20m:±50mm※2 周囲照度 100,000lx以下 |
反射率90%白ケント紙 0.1~30m:±30mm※1
0.1~30m:±50mm※2 周囲照度 3,000lx以下
0.1~30m:±50mm※2 周囲照度 100,000lx以下 |
| 測定分解能及び繰返し精度 |
1mm 単位 |
反射率10%黒紙 0.1~15m:σ<10mm、15~30m:σ<15mm※1
0.1~30m:σ<20mm※2 周囲照度 3,000lx以下
0.1~20m:σ<30mm※2 周囲照度 100,000lx以下 |
反射率90%白ケント紙 0.1~30m:σ<10mm※1
0.1~30m:σ<15mm※2 周囲照度 3,000lx以下
0.1~30m:σ<30mm※2 周囲照度 100,000lx以下 |
| 走査角度 |
190度 |
| 角度分解能 |
約0.125度(360°/2880分割) |
| 走査時間 |
50ms(モーター回転数 1200rpm) |
| インターフェース |
Ethernet 100BASE-TX(Auto-negotiation) |
| 出力 |
OUTPUT 6点:同期マスタ出力、同期出力、故障出力、検知出力1~3 |
| 入力 |
INPUT 5点:同期入力、エリア入力1~4 |
| 使用周囲温度、湿度 |
-10~+50℃ 85%RH (-30~+50℃ 85%RH:ヒーター使用時)、
但し結露、凍結がないこと |
| 保護構造 |
IP67 |
| 質量 |
約1200g(ケーブル含む) |
※1.室内環境にて(蛍光灯 1,000lx以下)
※2.外光の直射時は検出が保証できません(西日などが入らないよう配慮願います)。
※環境の影響は実機での確認をお願いします。
出力回路に自己保持機能付き接点出力を接続する際は、起動時に意図しない出力状態を保持しないように十分な検証を行って下さい。







