Basic Features
OpenCR1.0 (Open-source Control module for ROS) is an open source robot controller embedded with a powerful MCU from the ARM Cortex-M7 line-up.
The hardware, software, schematics, PCB Gerber, BOM, and firmware source codes of the OpenCR1.0,
the main controller used in the official ROS education platform TurtleBot3, are accessible and open to the public.
Supports RS-485 and TTL to control the Dynamixels, and offers UART, CAN and a variety of other communication environment, development tools such as Arduino IDE are available as well.
It has the advantage of being able to operate more powerfully when used with a host controller such as SBC (Single Board Computer).
It provides various exclusive sources based on ROS, so that you can maximize the functions of OpenCR1.0 when using ROS.
Package Contents
CONTROLLER: OpenCR1.0 x 1
CABLE: USB Micro B Cable x 1
Hardware Specifications
| Items |
Specifications |
| Microcontroller |
STM32F746ZGT6 / 32-bit ARM CortexR-M7 with FPU (216MHz, 462DMIPS) |
| Sensors |
Gyroscope 3Axis, Accelerometer 3Axis, Magnetometer 3Axis (MPU9250) |
| Programmer |
ARM Cortex 10pin JTAG/SWD connectorUSB Device Firmware Upgrade (DFU)Serial |
| Extension Pins |
32 pins (L 14, R 18) *Arduino connectivitySensor module x 4 pinsExtension connector x 18 pins |
| Communication Circuits |
USB (Micro-B USB connector/USB 2.0/Host/Peripheral/OTG)TTL (B3B-EH-A / Dynamixel),
RS485 (B4B-EH-A / Dynamixel)UART x 2 (20010WS-04), CAN (20010WS-04) |
| LEDs and buttons |
LD2 (red/green) : USB communicationUser LED x 4 : LD3 (red), LD4 (green), LD5 (blue)
User button x 2 |
| Powers |
External input source5 V (USB VBUS), 7-24 V (Battery or SMPS)
Default battery : LI-PO 11.1V 1,800mAh 19.98Wh
Default SMPS : 12V 5A
External output source
12V@1A(SMW250-02), 5V@4A(5267-02A), 3.3V@800mA(20010WS-02)
External battery Port for RTC (Real Time Clock) (Molex 53047-0210)
Power LED: LD1 (red, 3.3 V power on)
Reset button x 1 (for power reset of board)
Power on/off switch x 1 |
| Dimensions |
105(W) X 75(D) mm |
| Weight (g) |
60 |
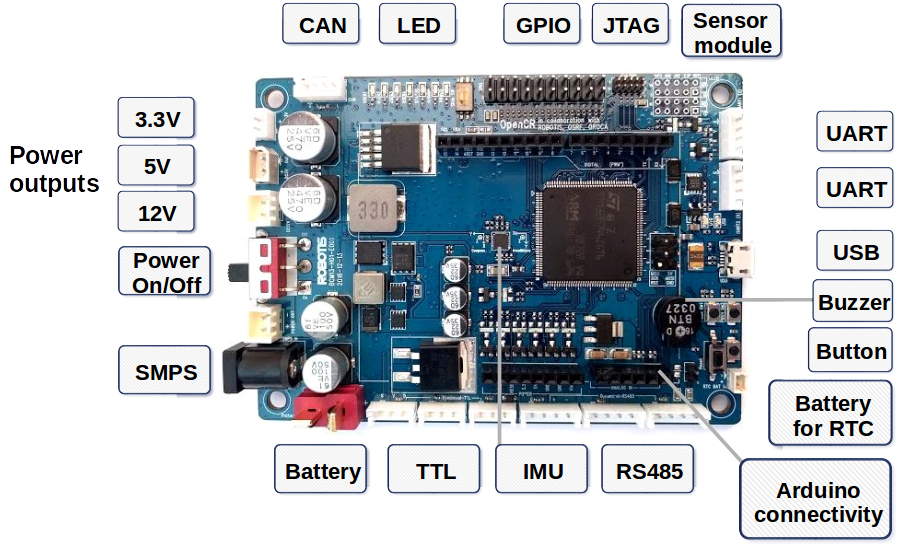
Diagram
Hyperlinks
Controller Compatibility Chart : Click Here
Software RoboPlus (R+) :Click Here
Manual : Click Here







